State Key Laboratory of Digital Manufacturing Equipment and Technology, School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan, 430074, China.
Guangdong Intelligent Robotics Institute, Dongguan, 523808, China.
Sci Rep. 2022 Apr 7;12(1):5892. doi: 10.1038/s41598-022-09937-9.
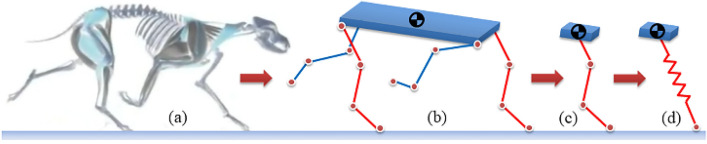
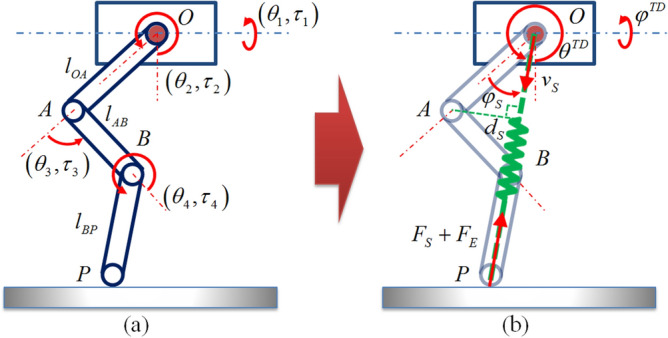
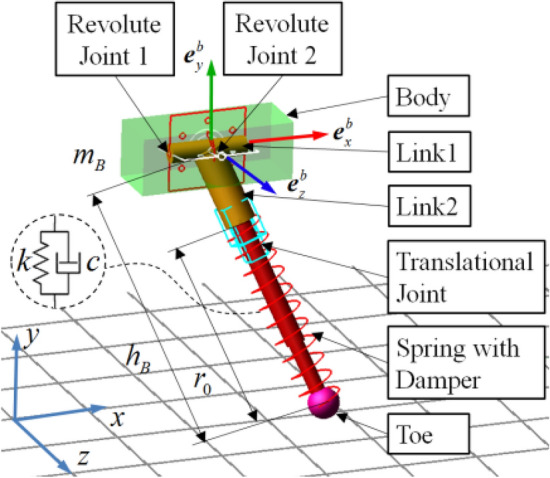
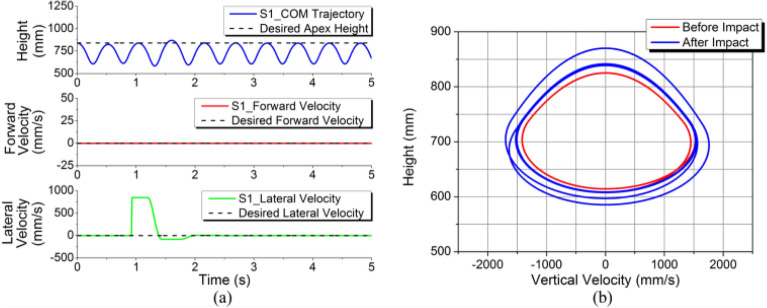
Inspired by biomechanical studies, the spring-loaded inverted pendulum model is an effective behavior model to describe the running movement of animals and legged robots in the sagittal plane. However, when confronted with external lateral disturbances, the model has to move out of the 2-D plane and be extended to 3-D locomotion. With the degree of freedom increasing, the computational complexity is higher and the real-time control is more and more difficult, especially when considering the complex legged model. Here, we construct a control strategy based on the classical Raibert controller for legged locomotion under lateral impact disturbances. This strategy, named 3D-HFC, is composed of three core modules: touchdown angle control, body attitude angle control and energy compensation. The energy loss in each step is taken into consideration, and the real-time measured energy loss of the current step is adopted to predict that of the next step. We demonstrate the efficiency of the proposed control strategy on a simulated 3D-SLIP lower order model and a simulated running quadruped, which are perturbed by different impact forces. Furthermore, a quadruped bionic prototype named MBBOT was set up, on which lateral impact experiments were designed and implemented. Both simulation and experimental results show that the proposed approach can realize the impact disturbance rejection.
受生物力学研究的启发,弹簧加载倒立摆模型是一种有效的行为模型,可以描述动物和腿式机器人在矢状面中的跑步运动。然而,当遇到外部横向干扰时,该模型必须移出 2D 平面并扩展到 3D 运动。随着自由度的增加,计算复杂性越来越高,实时控制越来越困难,特别是在考虑复杂的腿式模型时。在这里,我们为腿部在横向冲击干扰下的运动构建了一个基于经典 Raibert 控制器的控制策略。该策略名为 3D-HFC,由三个核心模块组成:触地角度控制、身体姿态角度控制和能量补偿。考虑到每一步的能量损失,并采用当前步骤的实时测量能量损失来预测下一个步骤的能量损失。我们在模拟的 3D-SLIP 低阶模型和模拟的跑步四足机器人上演示了所提出的控制策略的有效性,这些模型受到不同冲击的干扰。此外,还建立了一个名为 MBBOT 的四足仿生原型,并对其进行了侧向冲击实验的设计和实施。仿真和实验结果均表明,所提出的方法可以实现对冲击干扰的抑制。