Faculty of Electrical Engineering and Computing, University of Zagreb, Unska 3, 10000 Zagreb, Croatia.
Institute for Marine and Coastal Research, University of Dubrovnik, Kneza Damjana Jude 12, 20000 Dubrovnik, Croatia.
Sensors (Basel). 2022 Apr 12;22(8):2961. doi: 10.3390/s22082961.
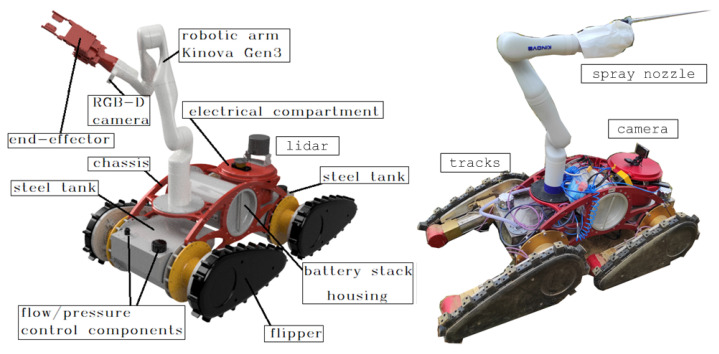
There are activities in viticulture and mariculture that require extreme physical endurance from human workers, making them prime candidates for automation and robotization. This paper presents a novel, practical, heterogeneous, autonomous robotic system divided into two main parts, each dealing with respective scenarios in viticulture and mariculture. The robotic components and the subsystems that enable collaboration were developed as part of the ongoing HEKTOR project, and each specific scenario is presented. In viticulture, this includes vineyard surveillance, spraying and suckering with an all-terrain mobile manipulator (ATMM) and a lightweight autonomous aerial robot (LAAR) that can be used in very steep vineyards where other mechanization fails. In mariculture, scenarios include coordinated aerial and subsurface monitoring of fish net pens using the LAAR, an autonomous surface vehicle (ASV), and a remotely operated underwater vehicle (ROV). All robotic components communicate and coordinate their actions through the Robot Operating System (ROS). Field tests demonstrate the great capabilities of the HEKTOR system for the fully autonomous execution of very strenuous and hazardous work in viticulture and mariculture, while meeting the necessary conditions for the required quality and quantity of the work performed.
在葡萄种植和水产养殖中有一些活动需要人类工人具备极高的身体耐力,这使得他们成为自动化和机器人化的主要候选人。本文提出了一种新颖、实用、异构、自主的机器人系统,分为两个主要部分,分别处理葡萄种植和水产养殖中的各自场景。机器人组件和使协作成为可能的子系统是作为正在进行的 HEKTOR 项目的一部分开发的,每个特定场景都进行了介绍。在葡萄种植中,这包括葡萄园监测、使用全地形移动机械手 (ATMM) 和可在其他机械化无法完成的非常陡峭的葡萄园中使用的轻型自主空中机器人 (LAAR) 进行喷雾和疏芽。在水产养殖中,场景包括使用 LAAR、自主水面艇 (ASV) 和遥控水下机器人 (ROV) 对鱼网箱进行协同空中和水下监测。所有机器人组件都通过机器人操作系统 (ROS) 进行通信和协调其行动。现场测试证明了 HEKTOR 系统在葡萄种植和水产养殖中完全自主执行非常艰苦和危险的工作的巨大能力,同时满足了工作质量和数量的必要条件。