Kamimura Tomoya, Sato Kaho, Aoi Shinya, Higurashi Yasuo, Wada Naomi, Tsuchiya Kazuo, Sano Akihito, Matsuno Fumitoshi
Department of Electrical and Mechanical Engineering, Nagoya Institute of Technology, Aichi, Japan.
Department of Aeronautics and Astronautics, Graduate School of Engineering, Kyoto University, Kyoto, Japan.
Front Bioeng Biotechnol. 2022 Apr 14;10:825638. doi: 10.3389/fbioe.2022.825638. eCollection 2022.
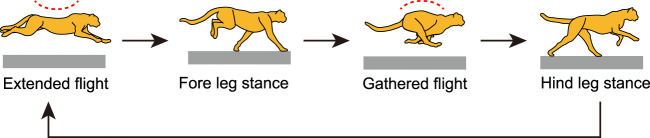
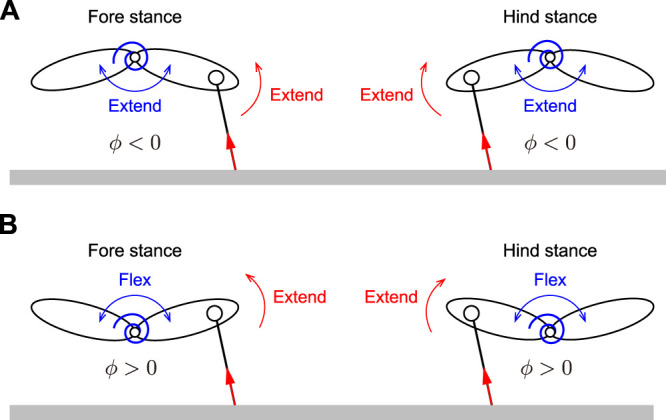
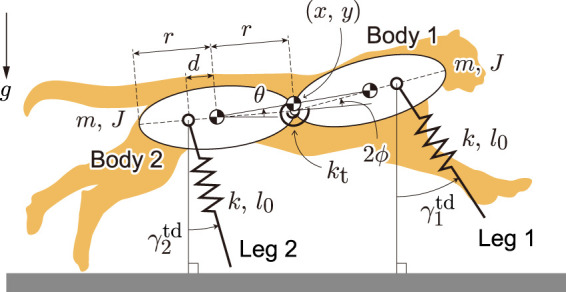
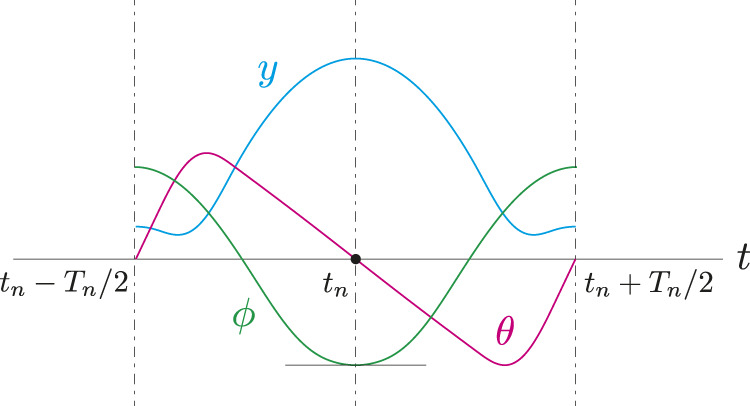
Cheetahs are the fastest land animal. Their galloping shows three characteristics: small vertical movement of their center of mass, small whole-body pitching movement, and large spine bending movement. We hypothesize that these characteristics lead to enhanced gait performance in cheetahs, including higher gait speed. In this study, we used a simple model with a spine joint and torsional spring, which emulate the body flexibility, to verify our hypothesis from a dynamic perspective. Specifically, we numerically searched periodic solutions and evaluated what extent each solution shows the three characteristics. We then evaluated the gait performance and found that the solutions with the characteristics achieve high performances. This result supports our hypothesis. Furthermore, we revealed the mechanism for the high performances through the dynamics of the spine movement. These findings extend the current understanding of the dynamic mechanisms underlying high-speed locomotion in cheetahs.
猎豹是陆地速度最快的动物。它们奔跑时呈现出三个特点:质心的垂直运动较小、全身俯仰运动较小以及脊柱弯曲运动较大。我们推测这些特点会提升猎豹的步态表现,包括更高的步态速度。在本研究中,我们使用了一个带有脊柱关节和扭转弹簧的简单模型,该模型模拟身体的灵活性,从动力学角度验证我们的推测。具体而言,我们通过数值方法寻找周期解,并评估每个解在多大程度上展现出这三个特点。然后我们评估步态表现,发现具有这些特点的解能实现高性能。这一结果支持了我们的推测。此外,我们通过脊柱运动的动力学揭示了高性能的机制。这些发现拓展了目前对猎豹高速运动背后动力学机制的理解。