Department of Electrical and Mechanical Engineering, Nagoya Institute of Technology, Nagoya, Japan.
Department of Aeronautics and Astronautics, Graduate School of Engineering, Kyoto University, Kyoto, Japan.
Sci Rep. 2021 May 5;11(1):9631. doi: 10.1038/s41598-021-88879-0.
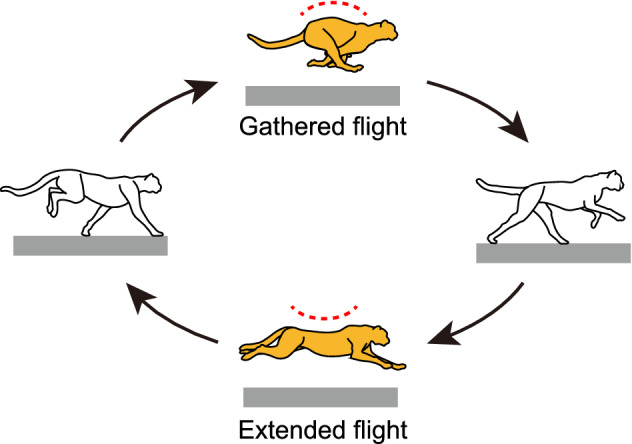
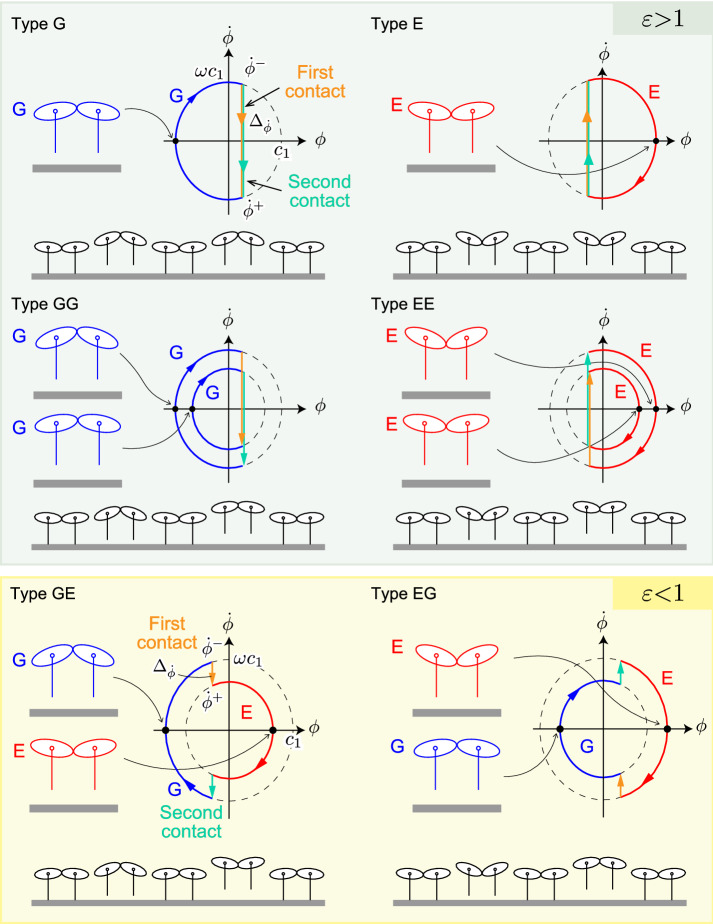
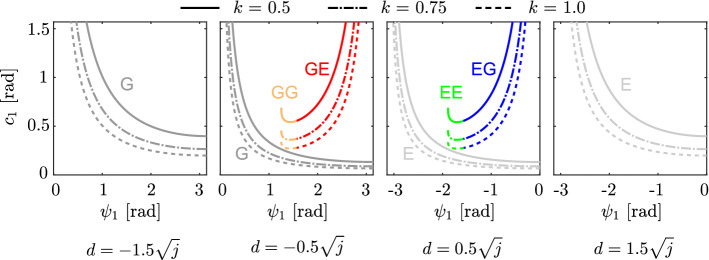
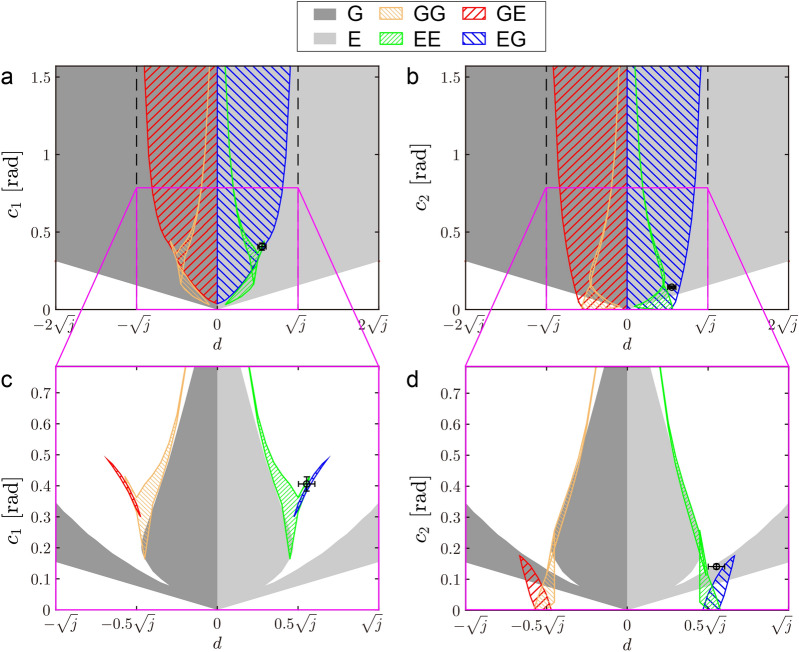
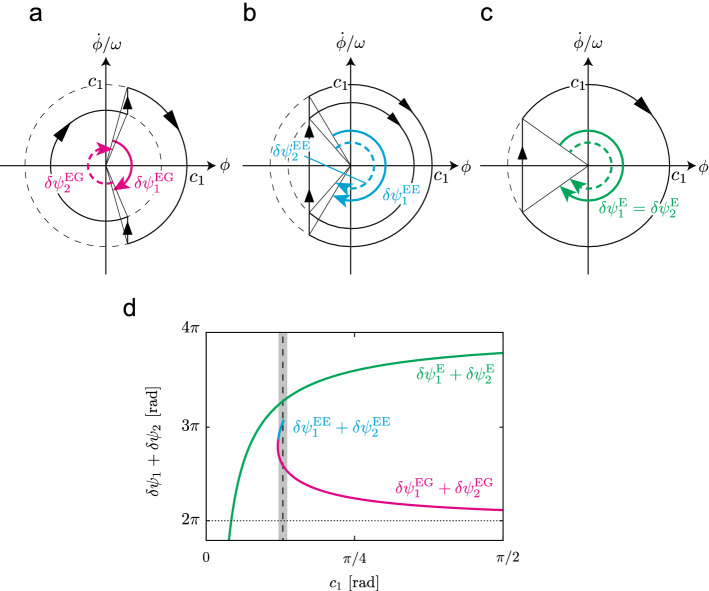
Cheetahs use a galloping gait in their fastest speed range. It has been reported that cheetahs achieve high-speed galloping by performing two types of flight through spine movement (gathered and extended). However, the dynamic factors that enable cheetahs to incorporate two types of flight while galloping remain unclear. To elucidate this issue from a dynamical viewpoint, we developed a simple analytical model. We derived possible periodic solutions with two different flight types (like cheetah galloping), and others with only one flight type (unlike cheetah galloping). The periodic solutions provided two criteria to determine the flight type, related to the position and magnitude of ground reaction forces entering the body. The periodic solutions and criteria were verified using measured cheetah data, and provided a dynamical mechanism by which galloping with two flight types enhances speed. These findings extend current understanding of the dynamical mechanisms underlying high-speed locomotion in cheetahs.
猎豹在其最快速度范围内使用奔跑步态。据报道,猎豹通过脊柱运动(聚集和伸展)来实现高速奔跑的两种飞行方式。然而,猎豹在奔跑时能够结合两种飞行方式的动态因素尚不清楚。为了从动力学角度阐明这个问题,我们开发了一个简单的分析模型。我们推导出了两种不同飞行类型(如猎豹奔跑)的可能的周期解,以及只有一种飞行类型(不像猎豹奔跑)的其他周期解。周期解提供了两个确定飞行类型的标准,与进入身体的地面反作用力的位置和大小有关。利用实测猎豹数据验证了周期解和标准,提供了一种动力学机制,说明两种飞行方式的奔跑如何提高速度。这些发现扩展了我们对猎豹高速运动背后动力学机制的现有理解。