Haptic Intelligence Department, Max Planck Institute for Intelligent Systems, Heisenbergstraße 3, 70569, Stuttgart, Germany.
Institut Des Systèmes Intelligents Et de Robotique, Centre National de La Recherche Scientifique (CNRS), Pyramide - T55/65, CC 173 - Place Jussieu 4, 75005, Paris, France.
Sci Rep. 2022 May 17;12(1):8215. doi: 10.1038/s41598-022-12010-0.
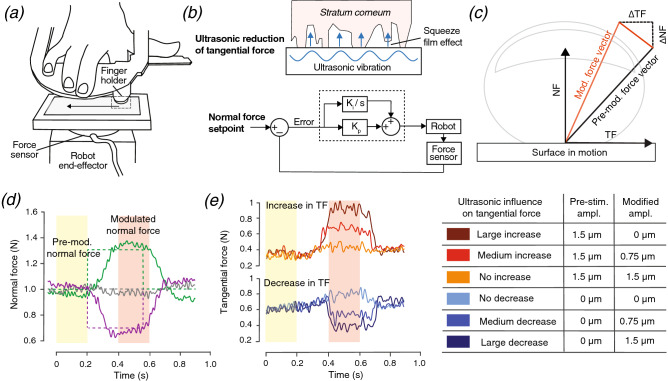
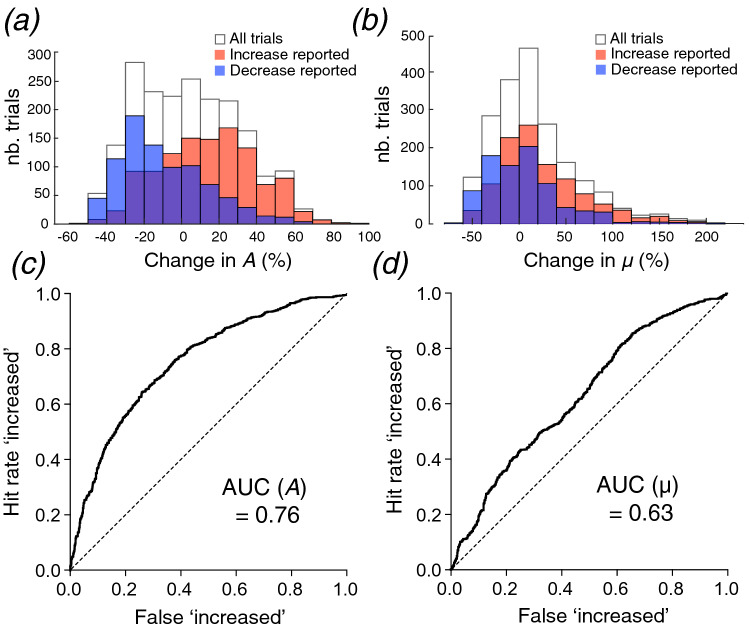
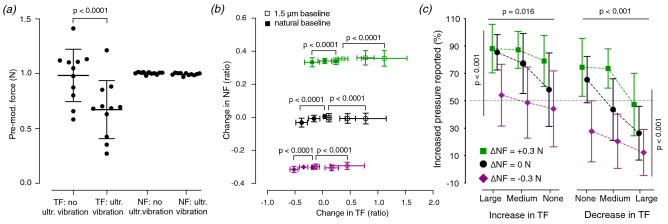
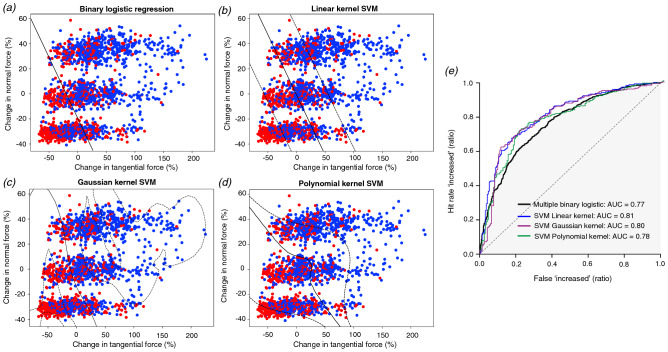
Humans need to accurately process the contact forces that arise as they perform everyday haptic interactions such as sliding the fingers along a surface to feel for bumps, sticky regions, or other irregularities. Several different mechanisms are possible for how the forces on the skin could be represented and integrated in such interactions. In this study, we used a force-controlled robotic platform and simultaneous ultrasonic modulation of the finger-surface friction to independently manipulate the normal and tangential forces during passive haptic stimulation by a flat surface. To assess whether the contact pressure on their finger had briefly increased or decreased during individual trials in this broad stimulus set, participants did not rely solely on either the normal force or the tangential force. Instead, they integrated tactile cues induced by both components. Support-vector-machine analysis classified physical trial data with up to 75% accuracy and suggested a linear perceptual mechanism. In addition, the change in the amplitude of the force vector predicted participants' responses better than the change of the coefficient of dynamic friction, suggesting that intensive tactile cues are meaningful in this task. These results provide novel insights about how normal and tangential forces shape the perception of tactile contact.
人类需要准确地处理在进行日常触觉交互时产生的接触力,例如沿着表面滑动手指以感受凸起、粘性区域或其他不规则形状。在这种交互中,皮肤受力的表示和整合可能有几种不同的机制。在这项研究中,我们使用力控机器人平台和同时对手指-表面摩擦的超声调制,在平面被动触觉刺激期间独立操纵法向力和切向力。为了评估参与者在这种广泛的刺激环境中单次试验期间,他们的手指上的接触压力是否短暂增加或减少,他们不仅依赖于法向力或切向力,而是整合了这两个分量所产生的触觉线索。支持向量机分析以高达 75%的准确率对物理试验数据进行分类,并提出了一种线性感知机制。此外,力向量的幅度变化比动态摩擦系数的变化更能预测参与者的反应,这表明在这个任务中,密集的触觉线索是有意义的。这些结果提供了关于法向力和切向力如何塑造触觉接触感知的新见解。