Delhaye Benoit, Lefèvre Philippe, Thonnard Jean-Louis
Institute of Neuroscience (IoNS), Université catholique de Louvain, Brussels, Belgium Institute of Information and Communication Technologies, Electronics and Applied Mathematics (ICTEAM), Université catholique de Louvain, Louvain-la-Neuve, Belgium.
Institute of Neuroscience (IoNS), Université catholique de Louvain, Brussels, Belgium Cliniques Universitaires Saint-Luc, Physical and Rehabilitation Medicine Department, Université catholique de Louvain, Brussels, Belgium
J R Soc Interface. 2014 Nov 6;11(100):20140698. doi: 10.1098/rsif.2014.0698.
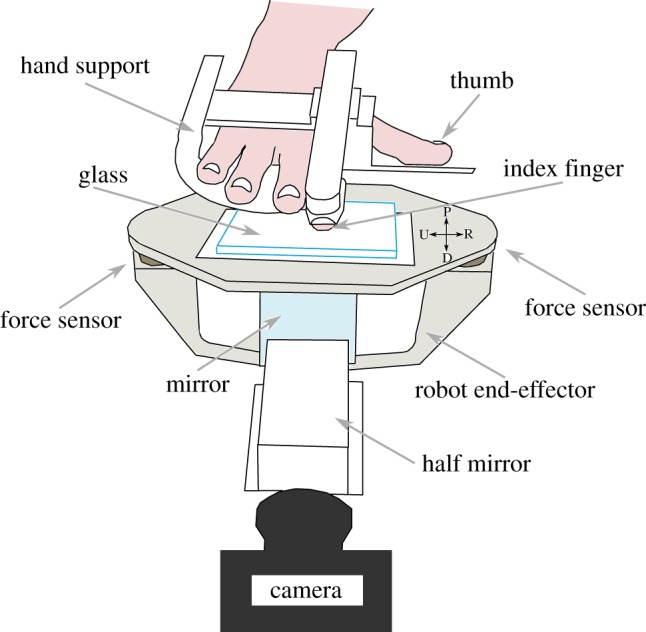
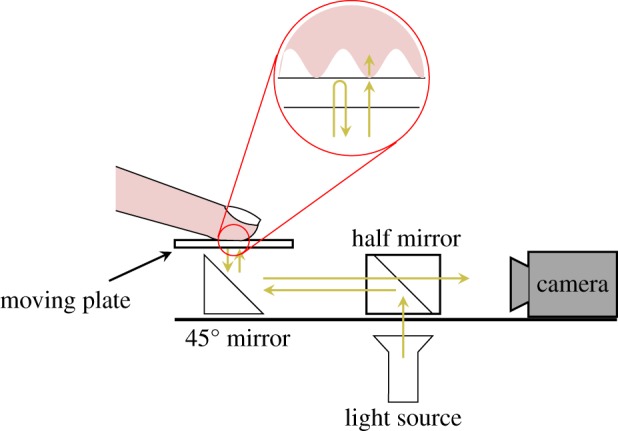
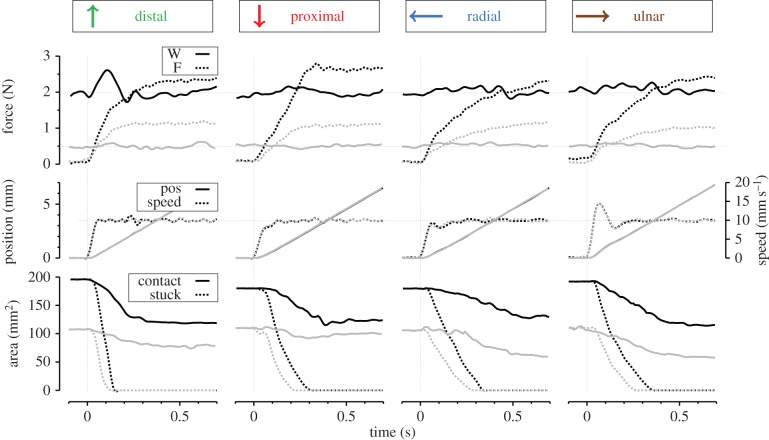
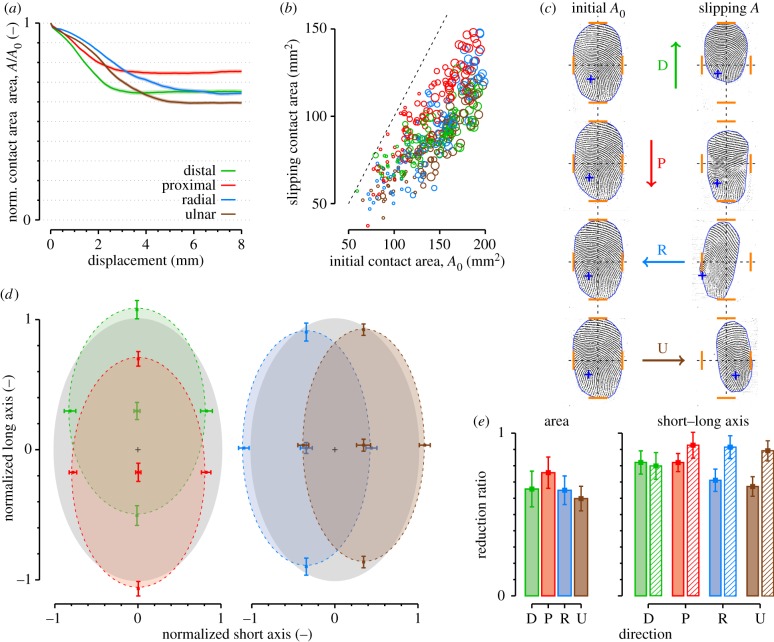
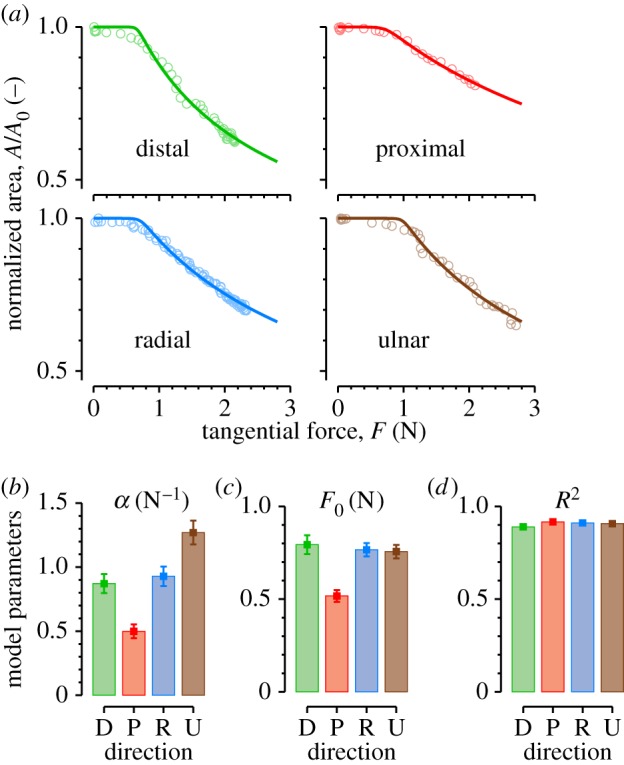
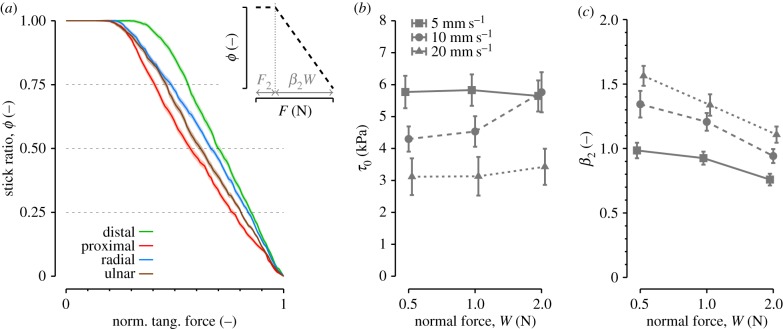
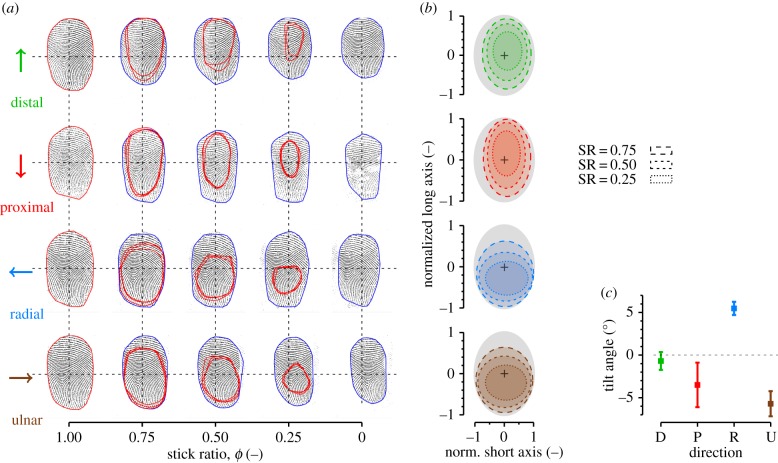
Through highly precise perceptual and sensorimotor activities, the human tactile system continuously acquires information about the environment. Mechanical interactions between the skin at the point of contact and a touched surface serve as the source of this tactile information. Using a dedicated custom robotic platform, we imaged skin deformation at the contact area between the finger and a flat surface during the onset of tangential sliding movements in four different directions (proximal, distal, radial and ulnar) and with varying normal force and tangential speeds. This simple tactile event evidenced complex mechanics. We observed a reduction of the contact area while increasing the tangential force and proposed to explain this phenomenon by nonlinear stiffening of the skin. The deformation's shape and amplitude were highly dependent on stimulation direction. We conclude that the complex, but highly patterned and reproducible, deformations measured in this study are a potential source of information for the central nervous system and that further mechanical measurement are needed to better understand tactile perceptual and motor performances.
通过高度精确的感知和感觉运动活动,人类触觉系统不断获取有关环境的信息。接触点处的皮肤与被触摸表面之间的机械相互作用是这种触觉信息的来源。我们使用一个专门定制的机器人平台,在手指与平面之间的接触区域,对四个不同方向(近端、远端、桡侧和尺侧)且法向力和切向速度各异的切向滑动运动开始时的皮肤变形进行了成像。这个简单的触觉事件证明了复杂的力学原理。我们观察到在增加切向力的同时接触面积减小,并提出用皮肤的非线性硬化来解释这一现象。变形的形状和幅度高度依赖于刺激方向。我们得出结论,本研究中测量到的复杂但高度有规律且可重复的变形是中枢神经系统潜在的信息来源,并且需要进一步进行力学测量以更好地理解触觉感知和运动表现。