Tousignant Mark R, Liu Xi, Ershad Langroodi Marzieh, Jarc Anthony M
Medical Safety and Innovation, Intuitive Surgical Inc., Sunnyvale, CA, United States.
Applied Research, Intuitive Surgical Inc., Peachtree Corners, GA, United States.
Front Surg. 2022 May 2;9:756522. doi: 10.3389/fsurg.2022.756522. eCollection 2022.
Surgical efficiency and variability are critical contributors to optimal outcomes, patient experience, care team experience, and total cost to treat per disease episode. Opportunities remain to develop scalable, objective methods to quantify surgical behaviors that maximize efficiency and reduce variability. Such objective measures can then be used to provide surgeons with timely and user-specific feedbacks to monitor performances and facilitate training and learning. In this study, we used objective task-level analysis to identify dominant contributors toward surgical efficiency and variability across the procedural steps of robotic-assisted sleeve gastrectomy (RSG) over a five-year period for a single surgeon. These results enable actionable insights that can both complement those from population level analyses and be tailored to an individual surgeon's practice and experience.
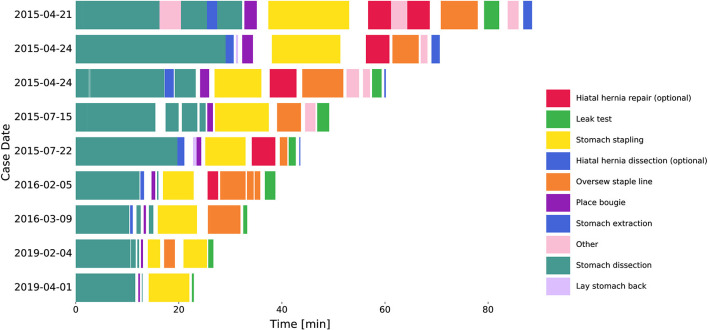
Intraoperative video recordings of 77 RSG procedures performed by a single surgeon from 2015 to 2019 were reviewed and segmented into surgical tasks. Surgeon-initiated events when controlling the robotic-assisted surgical system were used to compute objective metrics. A series of multi-staged regression analysis were used to determine: if any specific tasks or patient body mass index (BMI) statistically impacted procedure duration; which objective metrics impacted critical task efficiency; and which task(s) statistically contributed to procedure variability.
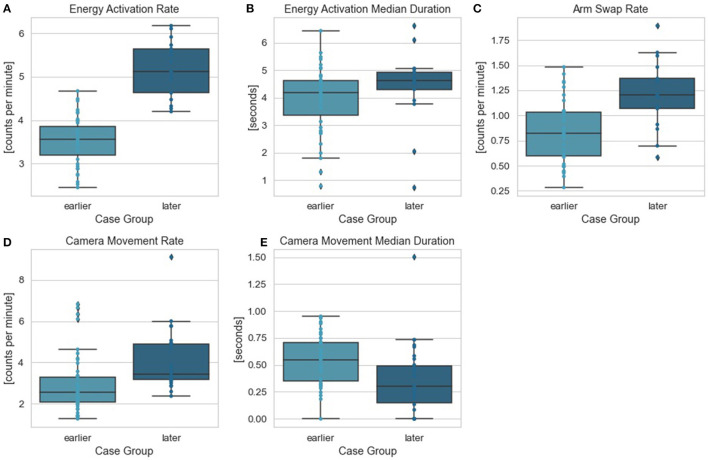
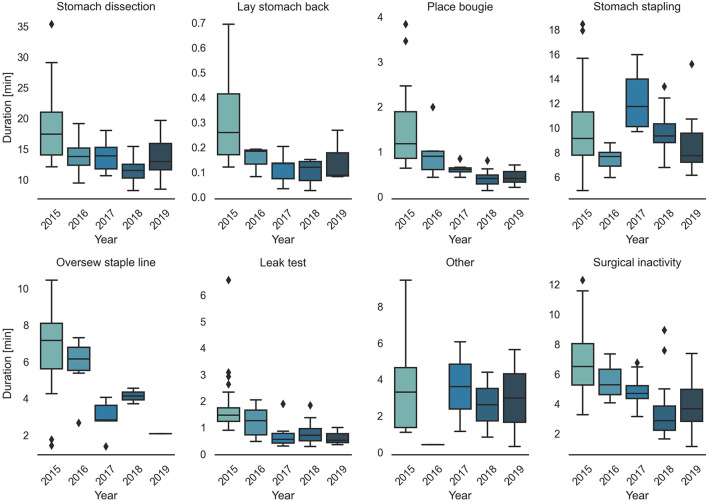
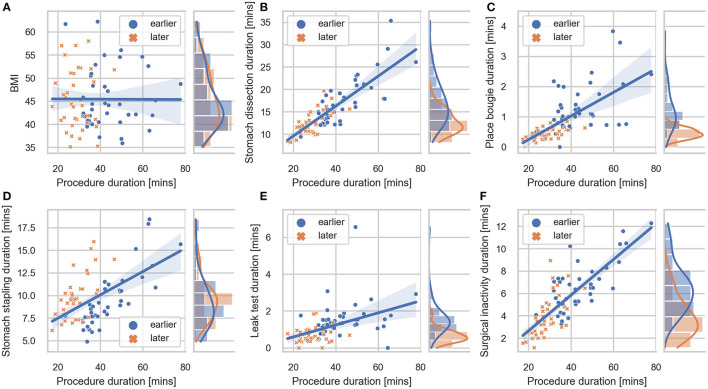
Stomach dissection was found to be the most significant contributor to procedure duration (β = 0.344, < 0.001; = 0.81, < 0.001) followed by surgical inactivity and stomach stapling. Patient BMI was not found to be statistically significantly correlated with procedure duration ( = -0.01, = 0.90). Energy activation rate, a robotic system event-based metric, was identified as a dominant feature in predicting stomach dissection duration and differentiating earlier and later case groups. Reduction of procedure variability was observed between earlier (2015-2016) and later (2017-2019) groups (IQR = 14.20 min vs. 6.79 min). Stomach dissection was found to contribute most to procedure variability (β = 0.74, < 0.001).
A surgical task-based objective analysis was used to identify major contributors to surgical efficiency and variability. We believe this data-driven method will enable clinical teams to quantify surgeon-specific performance and identify actionable opportunities focused on the dominant surgical tasks impacting overall procedure efficiency and consistency.
手术效率和变异性是实现最佳治疗效果、提升患者体验、改善医护团队体验以及降低每次疾病发作治疗总成本的关键因素。目前仍有机会开发可扩展的客观方法来量化手术行为,以实现效率最大化并减少变异性。然后,这些客观指标可用于为外科医生提供及时且针对用户的反馈,以监测其手术表现,并促进培训与学习。在本研究中,我们采用客观任务层面分析,以确定在五年时间里,对于一位外科医生而言,机器人辅助袖状胃切除术(RSG)各手术步骤中影响手术效率和变异性的主要因素。这些结果能提供可付诸行动的见解,既能补充群体层面分析的结果,又能根据个体外科医生的实践和经验进行调整。
回顾了一位外科医生在2015年至2019年期间进行的77例RSG手术的术中视频记录,并将其分割为手术任务。利用控制机器人辅助手术系统时外科医生发起的事件来计算客观指标。采用一系列多阶段回归分析来确定:是否有任何特定任务或患者体重指数(BMI)对手术时长有统计学上的影响;哪些客观指标影响关键任务效率;以及哪些任务在统计学上导致了手术变异性。
发现胃解剖是手术时长的最主要影响因素(β = 0.344,P < 0.001;R² = 0.81,P < 0.001),其次是手术停顿和胃吻合。未发现患者BMI与手术时长有统计学上的显著相关性(R = -0.01,P = 0.90)。能量激活率,一种基于机器人系统事件的指标,被确定为预测胃解剖时长以及区分早期和晚期病例组的主要特征。在早期(2015 - 2016年)和晚期(2017 - 2019年)病例组之间观察到手术变异性有所降低(四分位距 = 14.20分钟对6.79分钟)。发现胃解剖对手术变异性的贡献最大(β = 0.74,P < 0.001)。
采用基于手术任务的客观分析来确定影响手术效率和变异性的主要因素。我们相信这种数据驱动的方法将使临床团队能够量化外科医生的特定表现,并识别出针对影响整体手术效率和一致性的主要手术任务的可付诸行动的机会。