Human Performance Laboratory, Department of Kinesiology, University of Calgary, Calgary, AB T2N 1N4, Canada.
Kinetyx Sciences Inc., Calgary, AB T2G 1M8, Canada.
Sensors (Basel). 2022 Apr 27;22(9):3338. doi: 10.3390/s22093338.
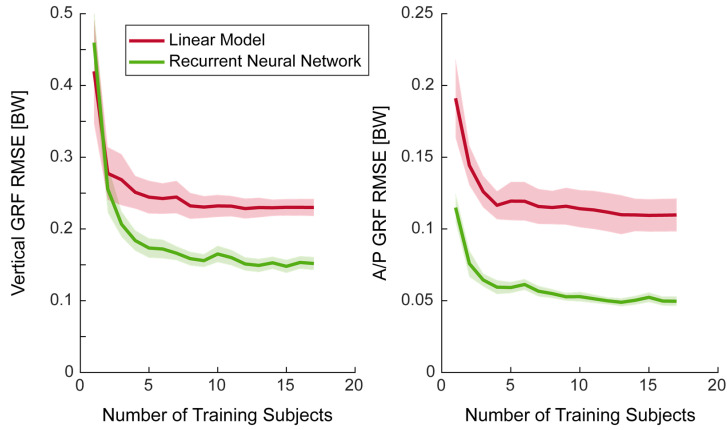
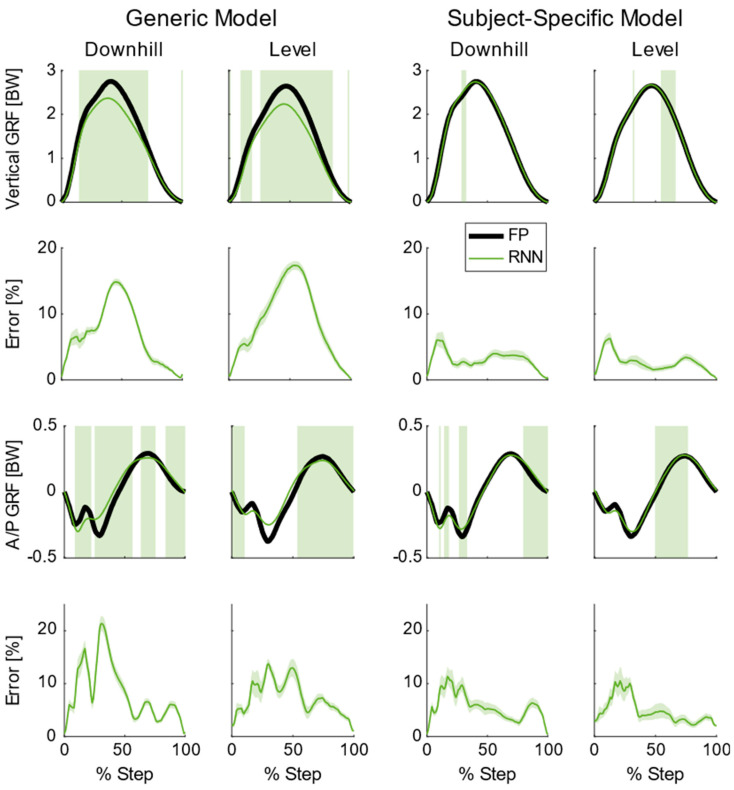
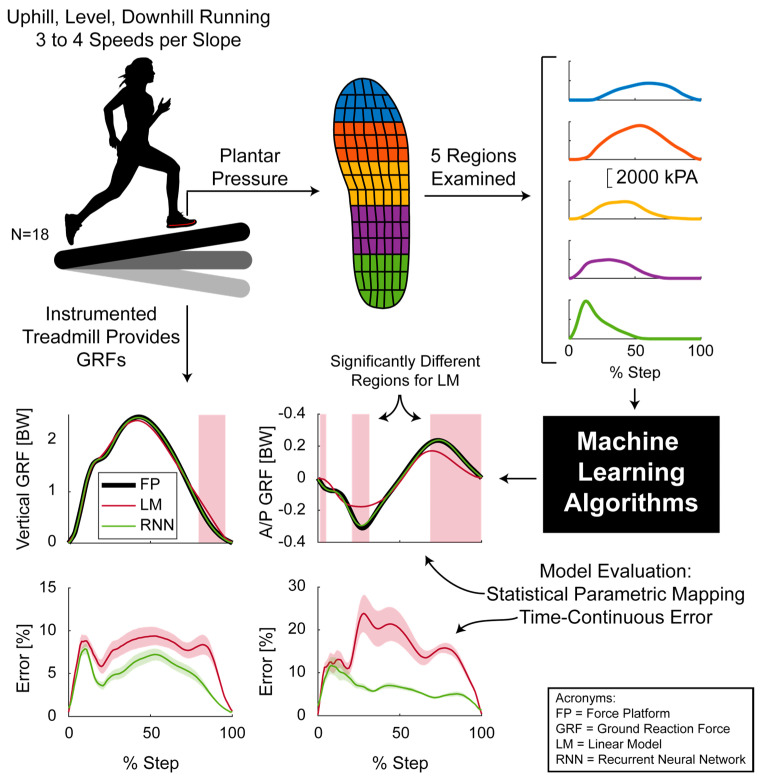
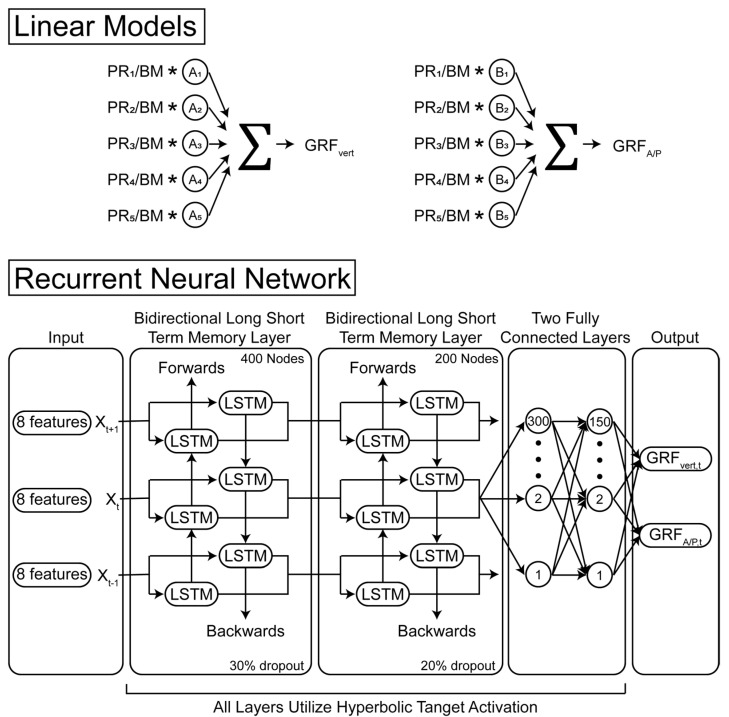
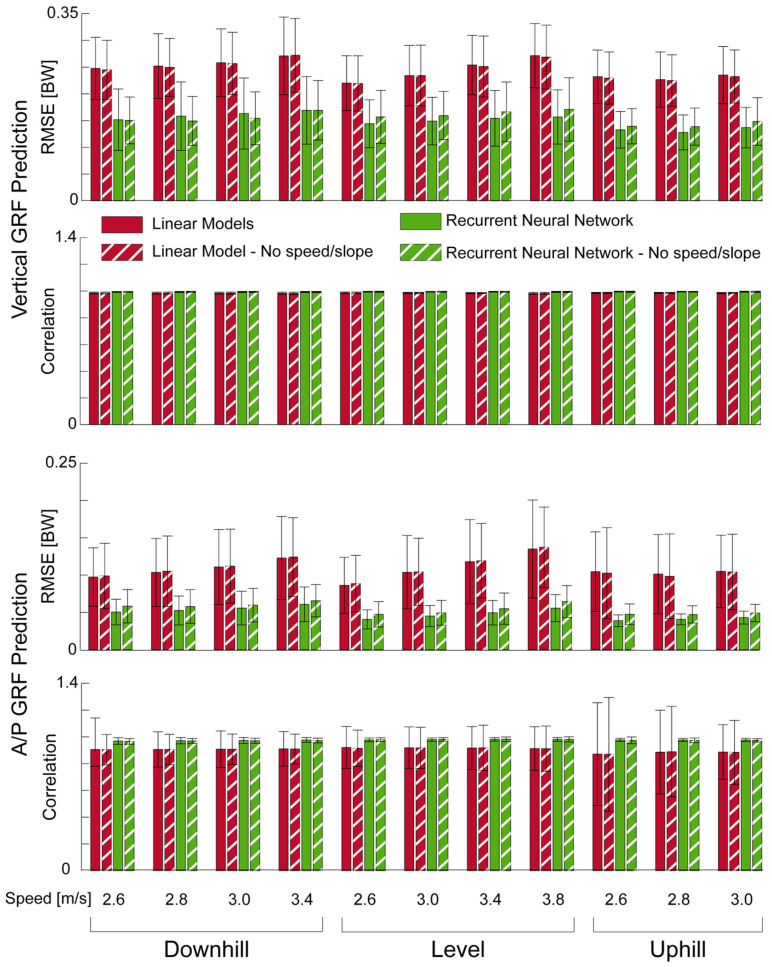
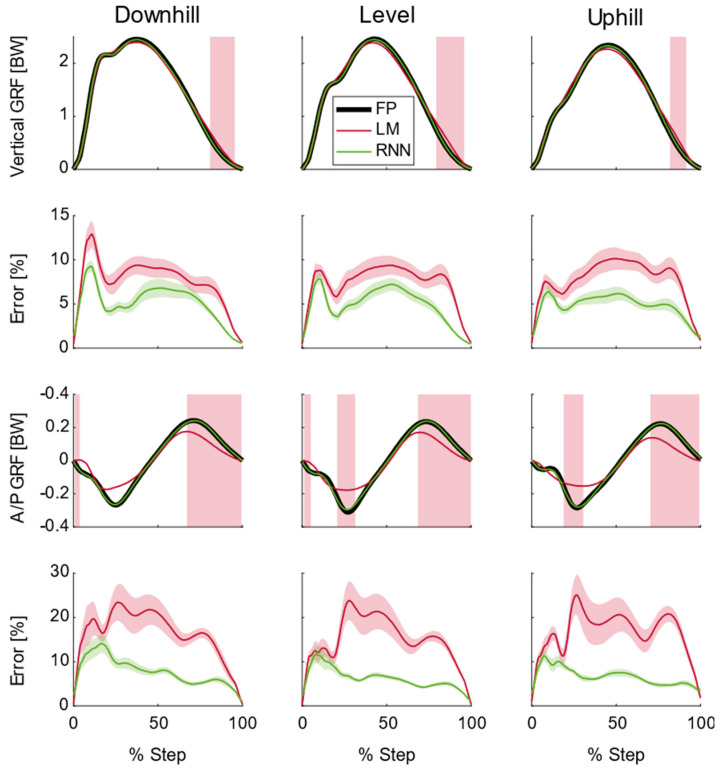
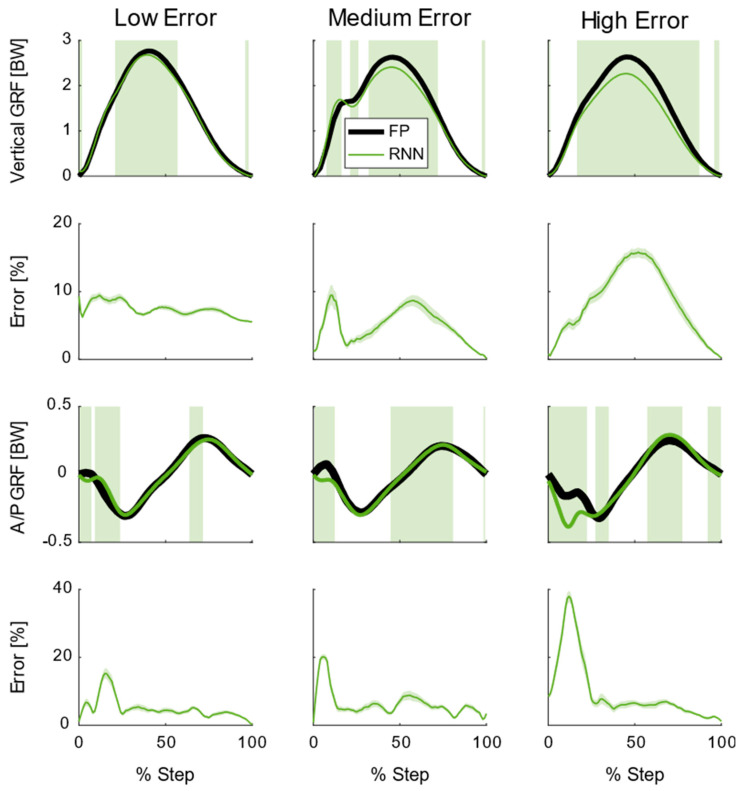
Ground reaction forces (GRFs) describe how runners interact with their surroundings and provide the basis for computing inverse dynamics. Wearable technology can predict time-continuous GRFs during walking and running; however, the majority of GRF predictions examine level ground locomotion. The purpose of this manuscript was to predict vertical and anterior-posterior GRFs across different speeds and slopes. Eighteen recreationally active subjects ran on an instrumented treadmill while we collected GRFs and plantar pressure. Subjects ran on level ground at 2.6, 3.0, 3.4, and 3.8 m/s, six degrees inclined at 2.6, 2.8, and 3.0 m/s, and six degrees declined at 2.6, 2.8, 3.0, and 3.4 m/s. We estimated GRFs using a set of linear models and a recurrent neural network, which used speed, slope, and plantar pressure as inputs. We also tested eliminating speed and slope as inputs. The recurrent neural network outperformed the linear model across all conditions, especially with the prediction of anterior-posterior GRFs. Eliminating speed and slope as model inputs had little effect on performance. We also demonstrate that subject-specific model training can reduce errors from 8% to 3%. With such low errors, researchers can use these wearable-based GRFs to understand running performance or injuries in real-world settings.
地面反作用力(GRF)描述了跑步者与周围环境的相互作用方式,并为计算反向动力学提供了基础。可穿戴技术可以预测步行和跑步过程中的时变 GRF;然而,大多数 GRF 预测都只检查平地运动。本文的目的是预测不同速度和坡度下的垂直和前后向 GRF。18 名有经验的跑步者在带仪器的跑步机上跑步,同时我们收集 GRF 和足底压力。受试者在水平地面上以 2.6、3.0、3.4 和 3.8 m/s 的速度,6 度倾斜以 2.6、2.8 和 3.0 m/s 的速度,6 度倾斜以 2.6、2.8、3.0 和 3.4 m/s 的速度跑步。我们使用一组线性模型和一个递归神经网络来估计 GRF,该网络将速度、坡度和足底压力作为输入。我们还测试了不将速度和坡度作为输入的情况。在所有条件下,递归神经网络的性能都优于线性模型,尤其是在预测前后向 GRF 方面。将速度和坡度作为模型输入删除对性能影响不大。我们还证明了基于特定于主题的模型训练可以将误差从 8%降低到 3%。如此低的误差,研究人员可以使用这些基于可穿戴设备的 GRF 在实际环境中了解跑步表现或受伤情况。