Faculdade de Engenharia, Universidade do Porto, 4200-465 Porto, Portugal.
Departamento de Engenharia Mecânica, Faculdade de Engenharia, Universidade do Porto, 4200-465 Porto, Portugal.
Sensors (Basel). 2022 Apr 29;22(9):3416. doi: 10.3390/s22093416.
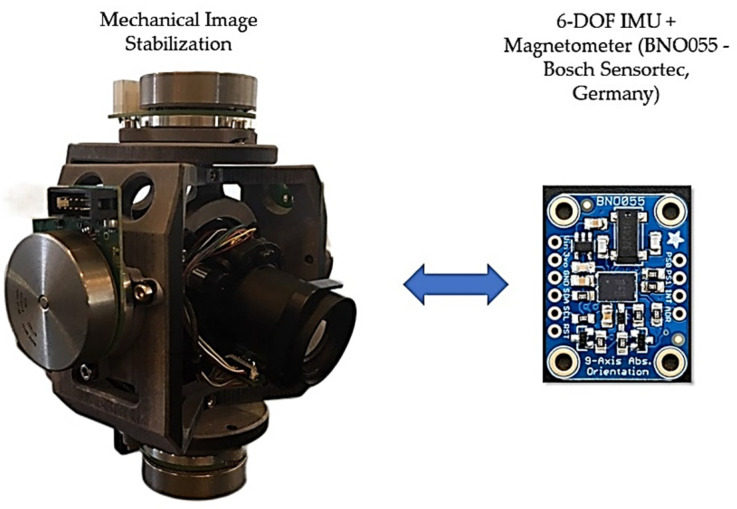
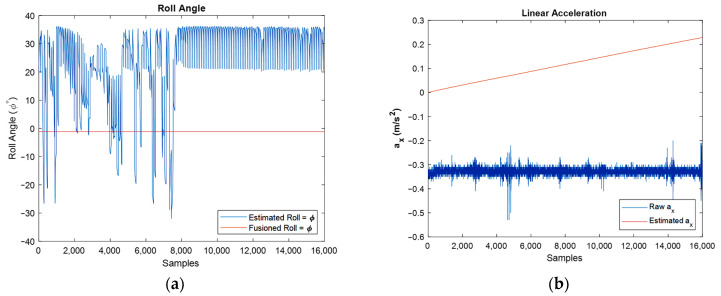
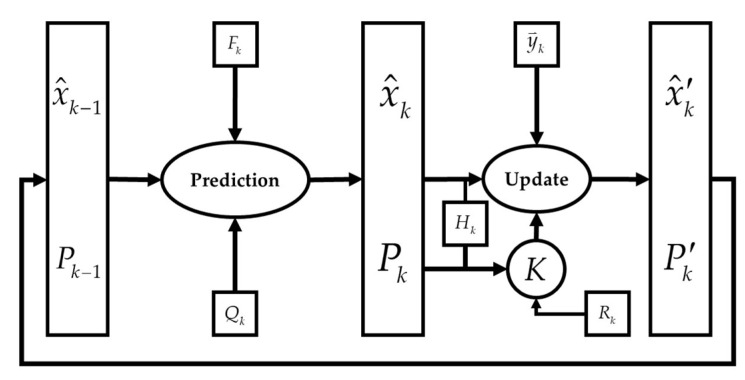
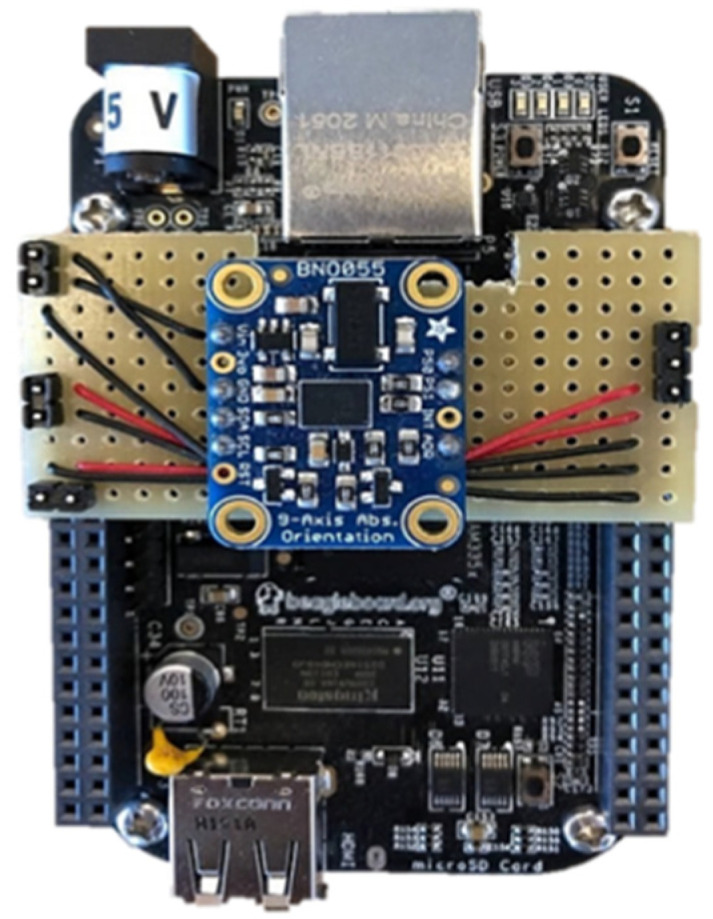
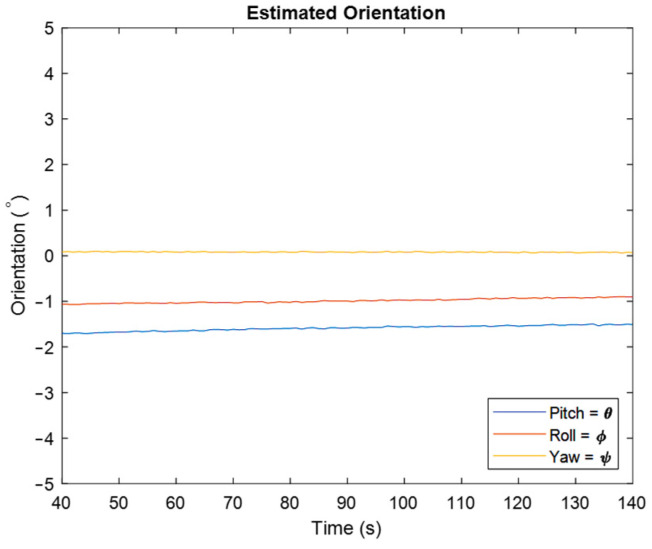
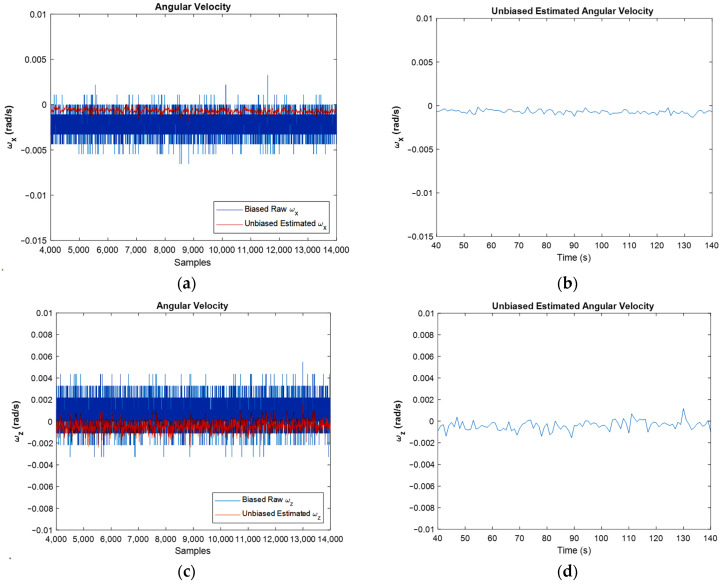
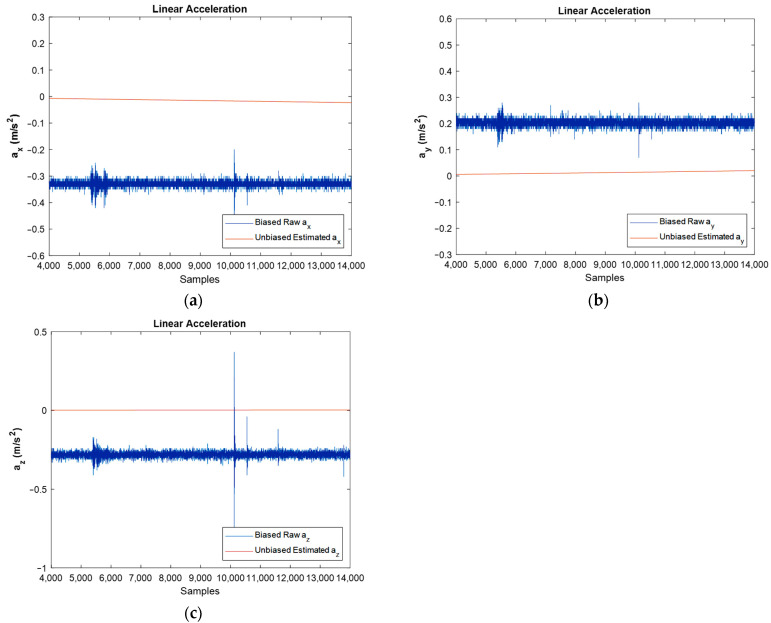
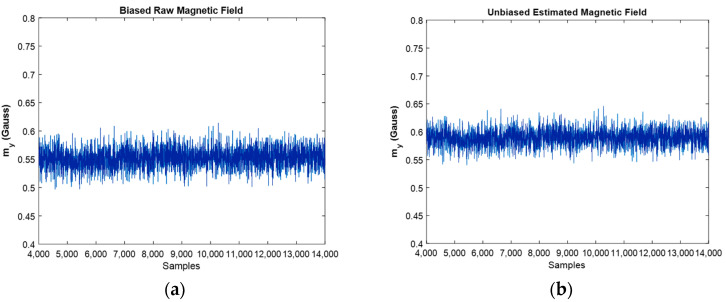
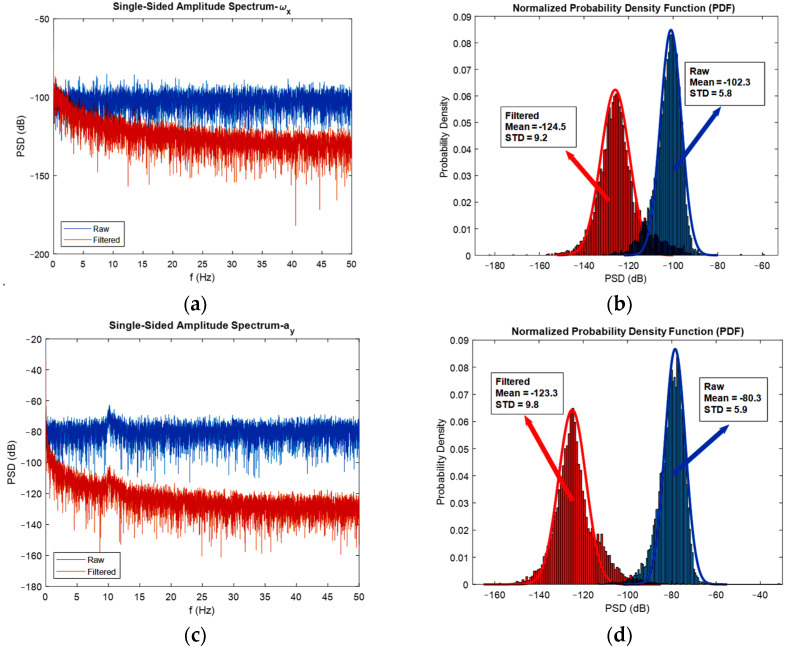
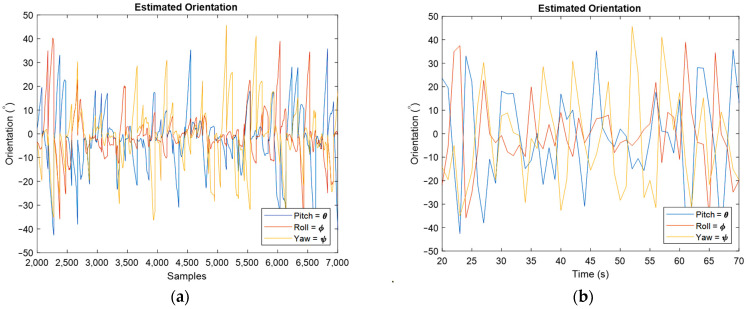
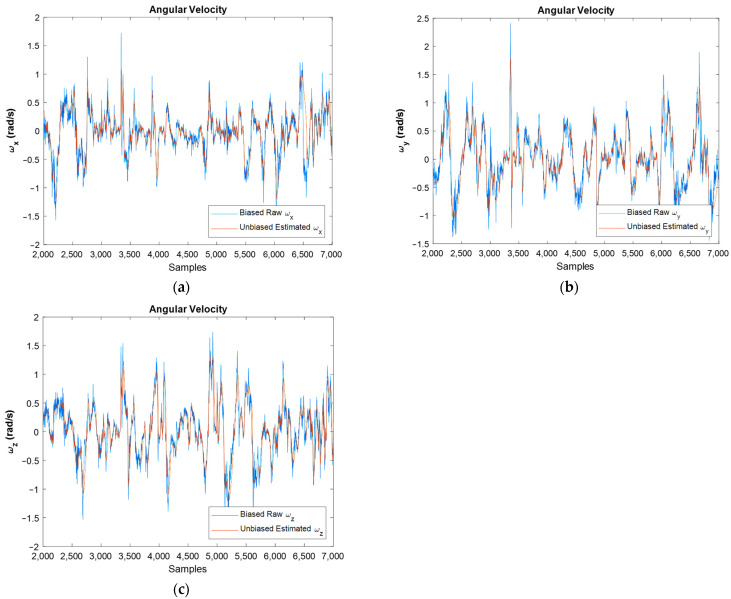
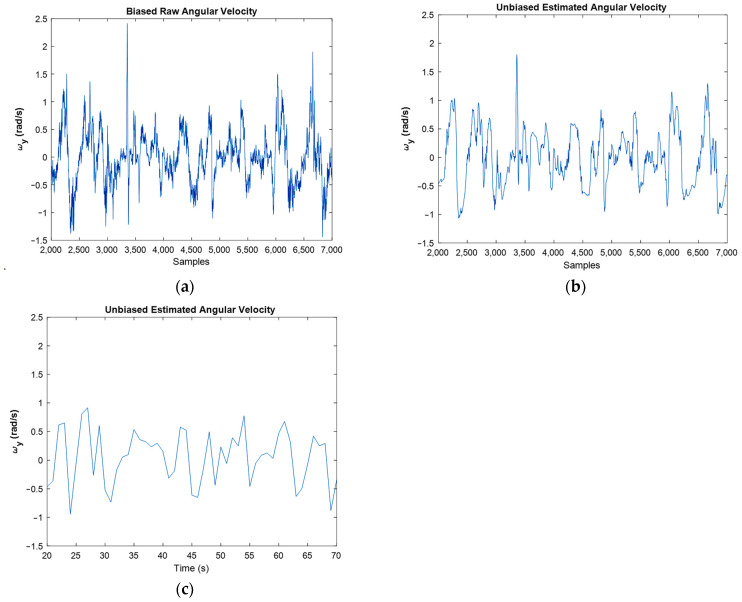
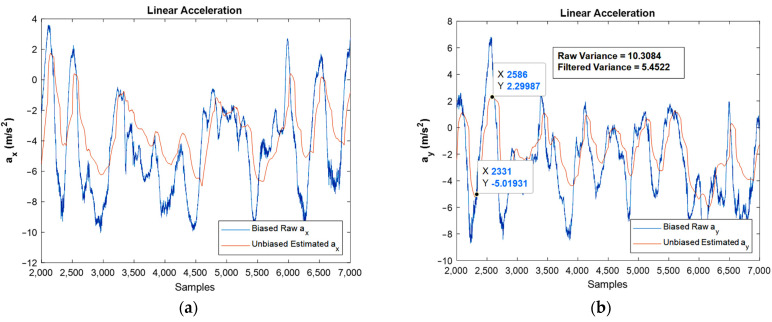
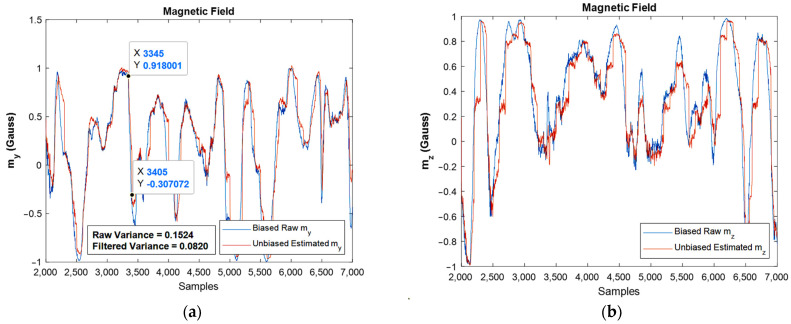
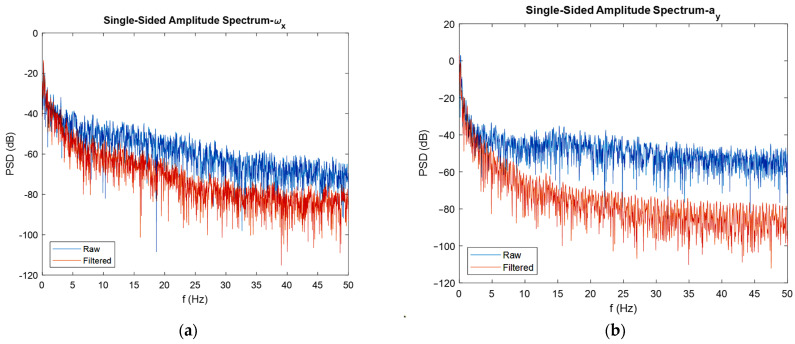
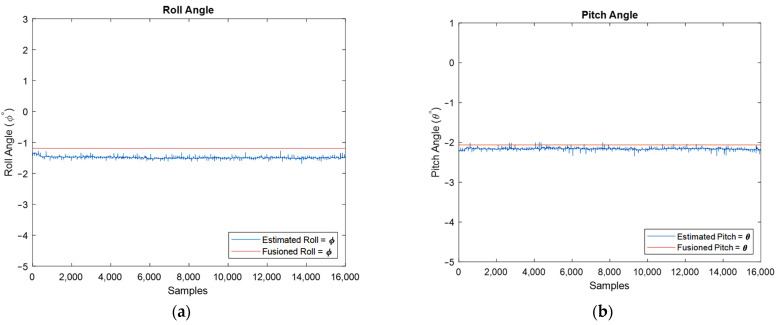
The attitude and heading reference system (AHRS) is an important concept in the area of navigation, image stabilization, and object detection and tracking. Many studies and works have been conducted in this regard to estimate the accurate orientation of rigid bodies. In most research in this area, low-cost MEMS sensors are employed, but since the system's response will diverge over time due to integration drift, it is necessary to apply proper estimation algorithms. A two-step extended Kalman Filter (EKF) algorithm is used in this study to estimate the orientation of an IMU. A 9-DOF device is used for this purpose, including a 6-DOF IMU with a three-axis gyroscope and a three-axis accelerometer, and a three-axis magnetometer. In addition, to have an accurate algorithm, both IMU and magnetometer biases and disturbances are modeled and considered in the real-time filter. After applying the algorithm to the sensor's output, an accurate orientation as well as unbiased angular velocity, linear acceleration, and magnetic field were achieved. In order to demonstrate the reduction of noise power, fast Fourier transform (FFT) diagrams are used. The effect of the initial condition on the response of the system is also investigated.
姿态与航向参考系统(AHRS)是导航、图像稳定以及目标检测和跟踪领域的一个重要概念。在这方面已经进行了许多研究和工作,以估计刚体的准确方向。在该领域的大多数研究中,使用了低成本的 MEMS 传感器,但是由于积分漂移,系统的响应会随时间发散,因此需要应用适当的估计算法。本研究使用两步扩展卡尔曼滤波器(EKF)算法来估计 IMU 的姿态。为此目的使用了一个 9 自由度的设备,包括一个带有三轴陀螺仪和三轴加速度计的 6 自由度 IMU,以及一个三轴磁力计。此外,为了具有准确的算法,在实时滤波器中对 IMU 和磁力计的偏差和干扰进行建模和考虑。在将算法应用于传感器的输出后,实现了准确的姿态以及无偏角速度、线性加速度和磁场。为了演示噪声功率的降低,使用了快速傅里叶变换(FFT)图。还研究了初始条件对系统响应的影响。