Fan Bingfei, Li Qingguo, Wang Chao, Liu Tao
State Key Laboratory of Fluid Power and Mechatronic Systems, School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China.
Department of Mechanical and Materials Engineering, Queen's University, Kingston, ON K7L 3N6, Canada.
Sensors (Basel). 2017 May 19;17(5):1161. doi: 10.3390/s17051161.
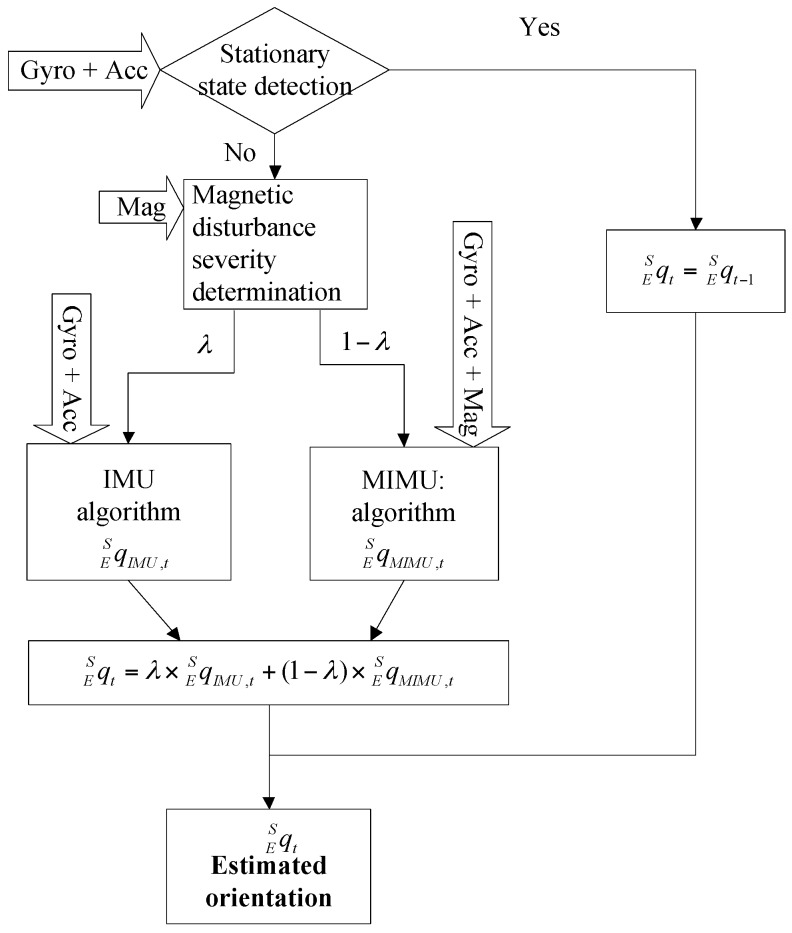
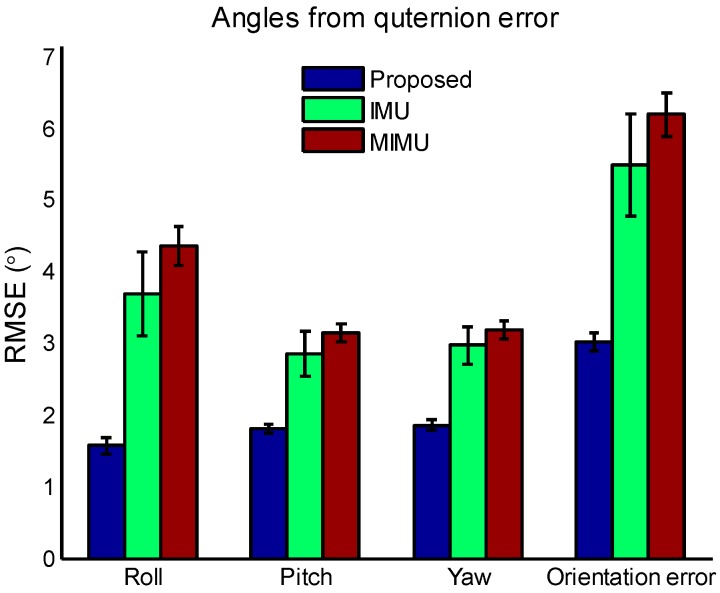
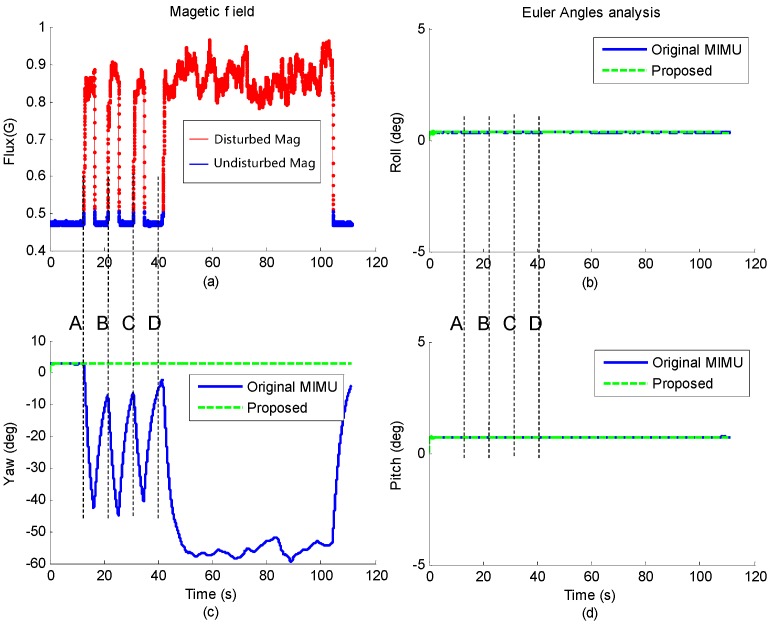
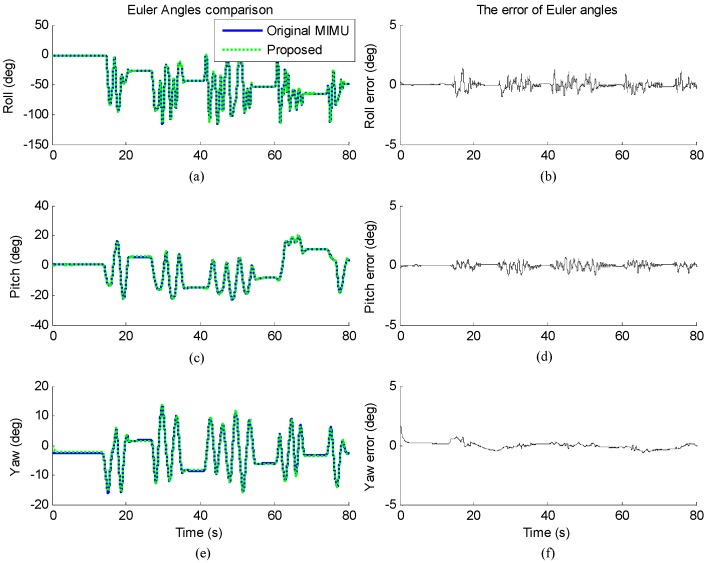
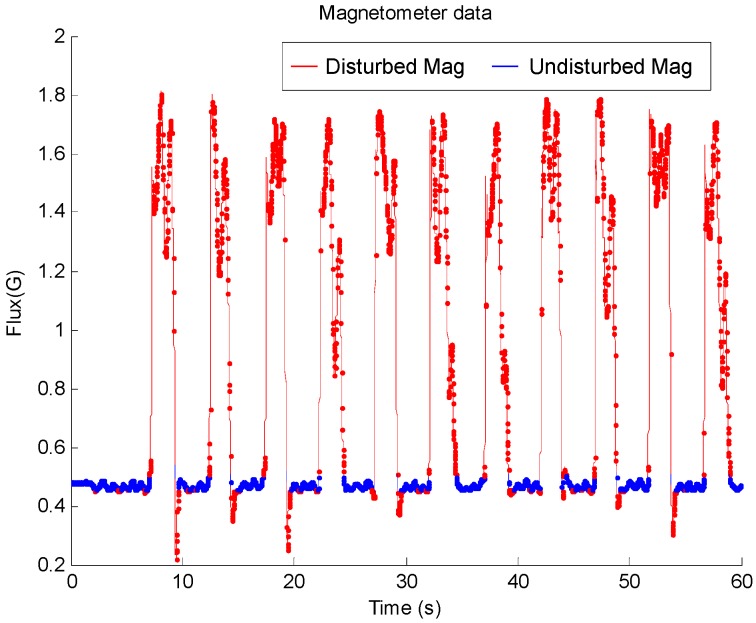
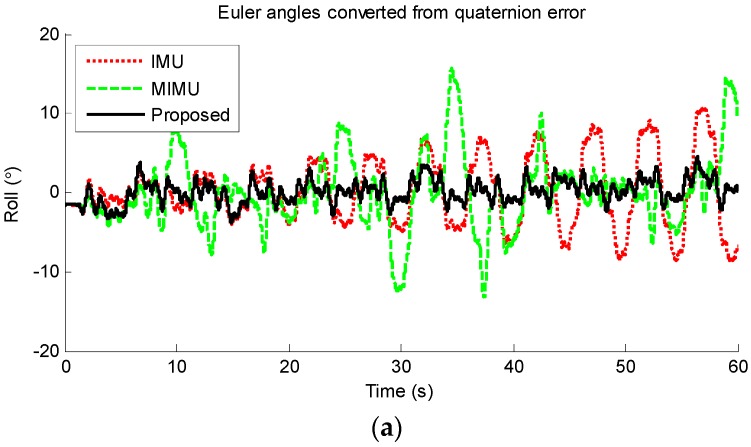
Magnetic and inertial sensors have been widely used to estimate the orientation of human segments due to their low cost, compact size and light weight. However, the accuracy of the estimated orientation is easily affected by external factors, especially when the sensor is used in an environment with magnetic disturbances. In this paper, we propose an adaptive method to improve the accuracy of orientation estimations in the presence of magnetic disturbances. The method is based on existing gradient descent algorithms, and it is performed prior to sensor fusion algorithms. The proposed method includes stationary state detection and magnetic disturbance severity determination. The stationary state detection makes this method immune to magnetic disturbances in stationary state, while the magnetic disturbance severity determination helps to determine the credibility of magnetometer data under dynamic conditions, so as to mitigate the negative effect of the magnetic disturbances. The proposed method was validated through experiments performed on a customized three-axis instrumented gimbal with known orientations. The error of the proposed method and the original gradient descent algorithms were calculated and compared. Experimental results demonstrate that in stationary state, the proposed method is completely immune to magnetic disturbances, and in dynamic conditions, the error caused by magnetic disturbance is reduced by 51.2% compared with original MIMU gradient descent algorithm.
由于成本低、尺寸紧凑且重量轻,磁传感器和惯性传感器已被广泛用于估计人体节段的方向。然而,估计方向的准确性很容易受到外部因素的影响,特别是当传感器在存在磁干扰的环境中使用时。在本文中,我们提出了一种自适应方法,以提高在存在磁干扰的情况下方向估计的准确性。该方法基于现有的梯度下降算法,并且在传感器融合算法之前执行。所提出的方法包括稳态检测和磁干扰严重程度确定。稳态检测使该方法在稳态下不受磁干扰影响,而磁干扰严重程度确定有助于确定动态条件下磁力计数据的可信度,从而减轻磁干扰的负面影响。通过在具有已知方向的定制三轴仪器化万向节上进行的实验对所提出的方法进行了验证。计算并比较了所提出的方法和原始梯度下降算法的误差。实验结果表明,在稳态下,所提出的方法完全不受磁干扰影响,在动态条件下,与原始MIMU梯度下降算法相比,由磁干扰引起的误差降低了51.2%。