Department of Geomatics Engineering, Schulich School of Engineering, University of Calgary, 2500 University Drive NW, Calgary, AB T2N 1N4, Canada.
Sensors (Basel). 2011;11(7):6771-98. doi: 10.3390/s110706771. Epub 2011 Jun 29.
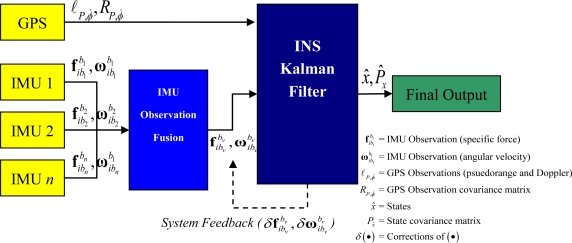
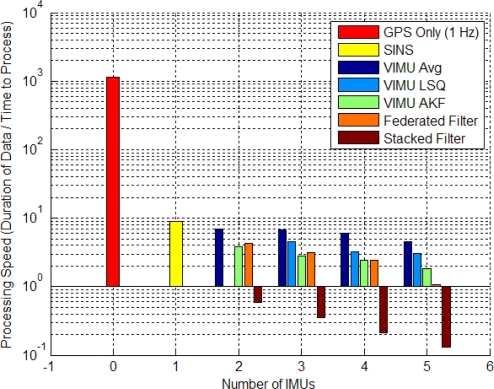
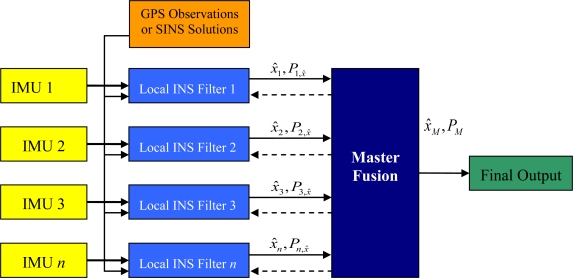
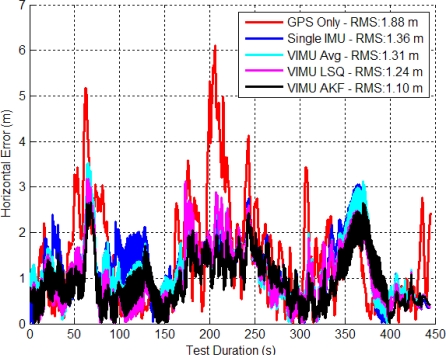
A single low cost inertial measurement unit (IMU) is often used in conjunction with GPS to increase the accuracy and improve the availability of the navigation solution for a pedestrian navigation system. This paper develops several fusion algorithms for using multiple IMUs to enhance performance. In particular, this research seeks to understand the benefits and detriments of each fusion method in the context of pedestrian navigation. Three fusion methods are proposed. First, all raw IMU measurements are mapped onto a common frame (i.e., a virtual frame) and processed in a typical combined GPS-IMU Kalman filter. Second, a large stacked filter is constructed of several IMUs. This filter construction allows for relative information between the IMUs to be used as updates. Third, a federated filter is used to process each IMU as a local filter. The output of each local filter is shared with a master filter, which in turn, shares information back with the local filters. The construction of each filter is discussed and improvements are made to the virtual IMU (VIMU) architecture, which is the most commonly used architecture in the literature. Since accuracy and availability are the most important characteristics of a pedestrian navigation system, the analysis of each filter's performance focuses on these two parameters. Data was collected in two environments, one where GPS signals are moderately attenuated and another where signals are severely attenuated. Accuracy is shown as a function of architecture and the number of IMUs used.
通常,单个低成本惯性测量单元(IMU)与 GPS 结合使用,以提高行人导航系统的导航解决方案的准确性和可用性。本文开发了几种融合算法,用于使用多个 IMU 来增强性能。特别是,本研究旨在了解行人导航背景下每种融合方法的优缺点。提出了三种融合方法。首先,所有原始 IMU 测量值都映射到公共框架(即虚拟框架)中,并在典型的组合 GPS-IMU 卡尔曼滤波器中进行处理。其次,构建了一个由多个 IMU 组成的大型堆叠滤波器。这种滤波器结构允许使用 IMU 之间的相对信息作为更新。第三,使用联邦滤波器来处理每个 IMU 作为本地滤波器。每个本地滤波器的输出与主滤波器共享,主滤波器反过来又与本地滤波器共享信息。讨论了每种滤波器的构建,并对虚拟 IMU(VIMU)架构进行了改进,这是文献中最常用的架构。由于准确性和可用性是行人导航系统最重要的特征,因此对每种滤波器性能的分析侧重于这两个参数。在两种环境中收集了数据,一种是 GPS 信号适度衰减的环境,另一种是信号严重衰减的环境。准确性显示为架构和使用的 IMU 数量的函数。