Sabelhaus Andrew P, Mehta Rohan K, Wertz Anthony T, Majidi Carmel
Soft Robotics Control Lab, Department of Mechanical Engineering, Boston University, Boston, MA, United States.
Soft Machines Lab, Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, United States.
Front Robot AI. 2022 May 17;9:888261. doi: 10.3389/frobt.2022.888261. eCollection 2022.
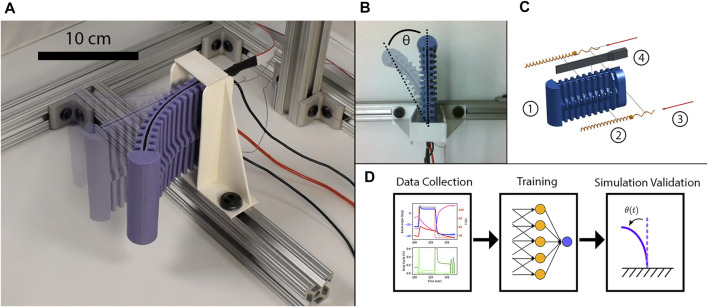
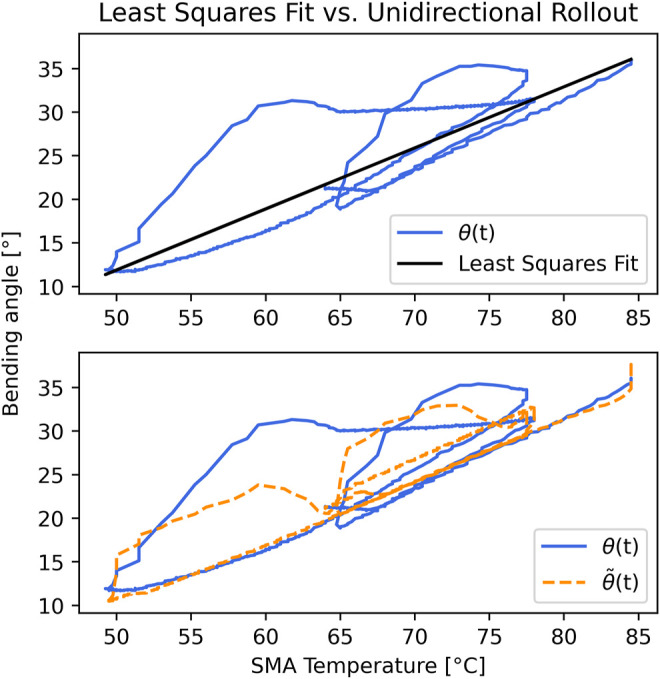
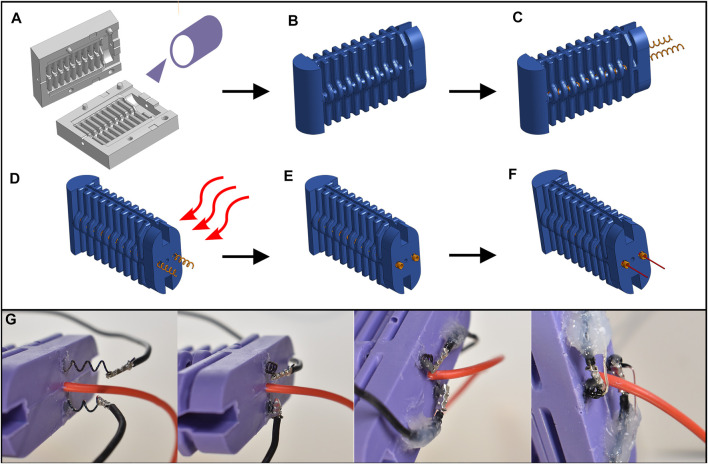
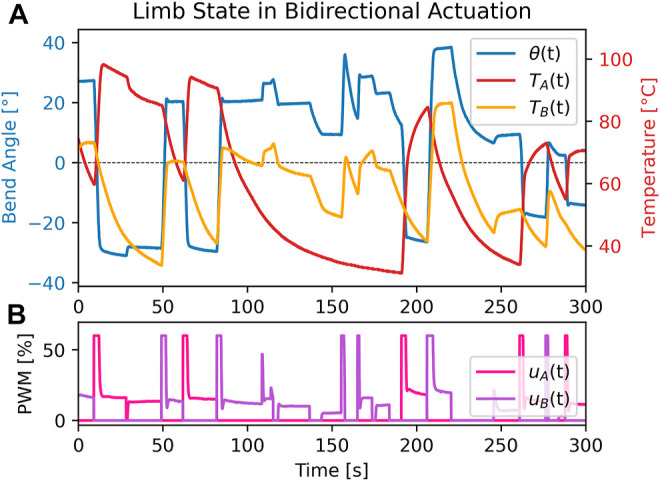
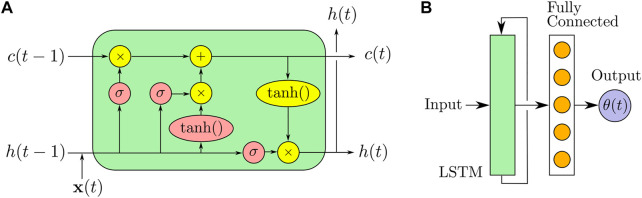
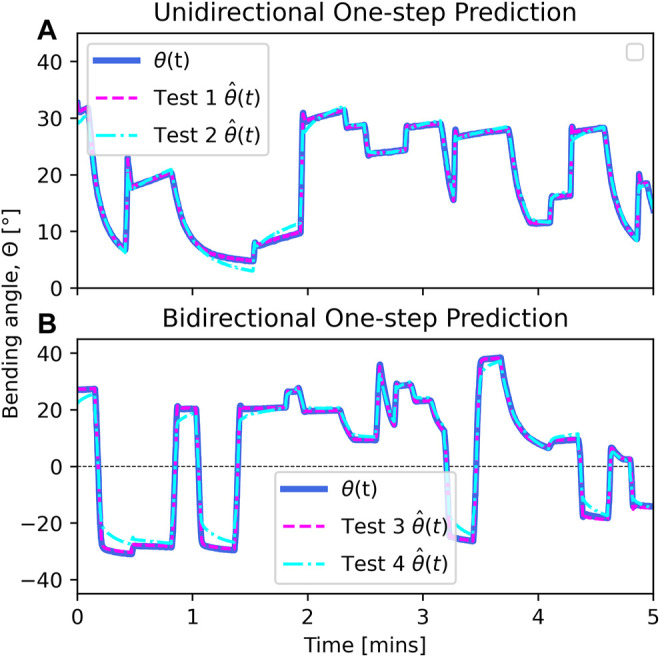
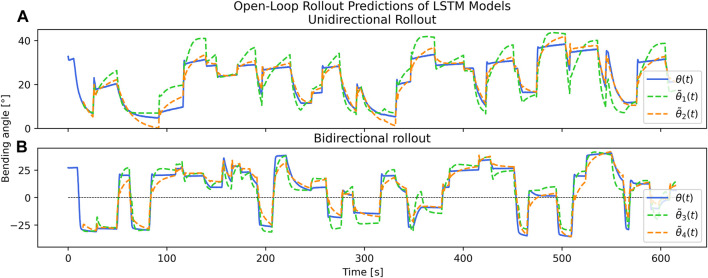
Untethered soft robots that locomote using electrothermally-responsive materials like shape memory alloy (SMA) face challenging design constraints for sensing actuator states. At the same time, modeling of actuator behaviors faces steep challenges, even with available sensor data, due to complex electrical-thermal-mechanical interactions and hysteresis. This article proposes a framework for sensing and dynamics modeling of actuator states, particularly temperature of SMA wires, which is used to predict robot motions. A planar soft limb is developed, actuated by a pair of SMA coils, that includes compact and robust sensors for temperature and angular deflection. Data from these sensors are used to train a neural network-based on the long short-term memory (LSTM) architecture to model both unidirectional (single SMA) and bidirectional (both SMAs) motion. Predictions from the model demonstrate that data from the temperature sensor, combined with control inputs, allow for dynamics predictions over extraordinarily long open-loop timescales (10 min) with little drift. Prediction errors are on the order of the soft deflection sensor's accuracy. This architecture allows for compact designs of electrothermally-actuated soft robots that include sensing sufficient for motion predictions, helping to bring these robots into practical application.
使用形状记忆合金(SMA)等电热响应材料进行移动的无束缚软机器人,在感知执行器状态方面面临具有挑战性的设计限制。与此同时,由于复杂的电热机械相互作用和滞后现象,即使有可用的传感器数据,执行器行为的建模也面临严峻挑战。本文提出了一个用于感知和动力学建模执行器状态的框架,特别是SMA丝的温度,该框架用于预测机器人的运动。开发了一种由一对SMA线圈驱动的平面软肢体,其中包括用于温度和角偏转的紧凑且坚固的传感器。来自这些传感器的数据用于训练基于长短期记忆(LSTM)架构的神经网络,以对单向(单个SMA)和双向(两个SMA)运动进行建模。模型预测表明,温度传感器的数据与控制输入相结合,能够在极长的开环时间尺度(10分钟)上进行动力学预测,且几乎没有漂移。预测误差与软偏转传感器的精度相当。这种架构允许对电热驱动的软机器人进行紧凑设计,其中包括足以进行运动预测的传感功能,有助于将这些机器人投入实际应用。