Truby Ryan L, Chin Lillian, Zhang Annan, Rus Daniela
Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology, Cambridge, MA 02139, USA.
Departments of Materials Science and Engineering and Mechanical Engineering, Northwestern University, Evanston, IL 60208, USA.
Sci Adv. 2022 Aug 12;8(32):eabq4385. doi: 10.1126/sciadv.abq4385. Epub 2022 Aug 10.
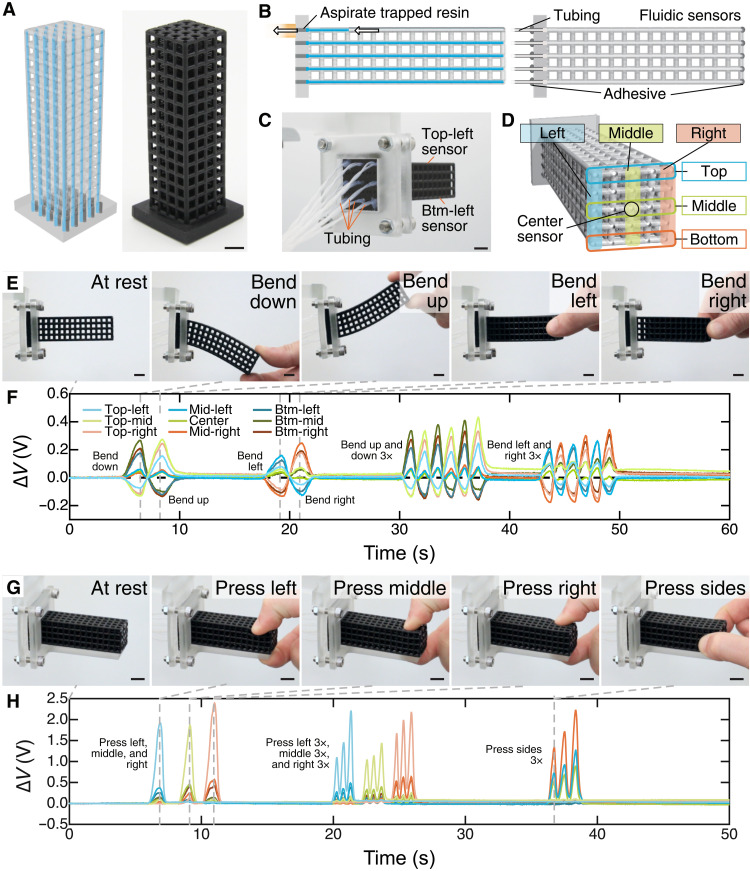
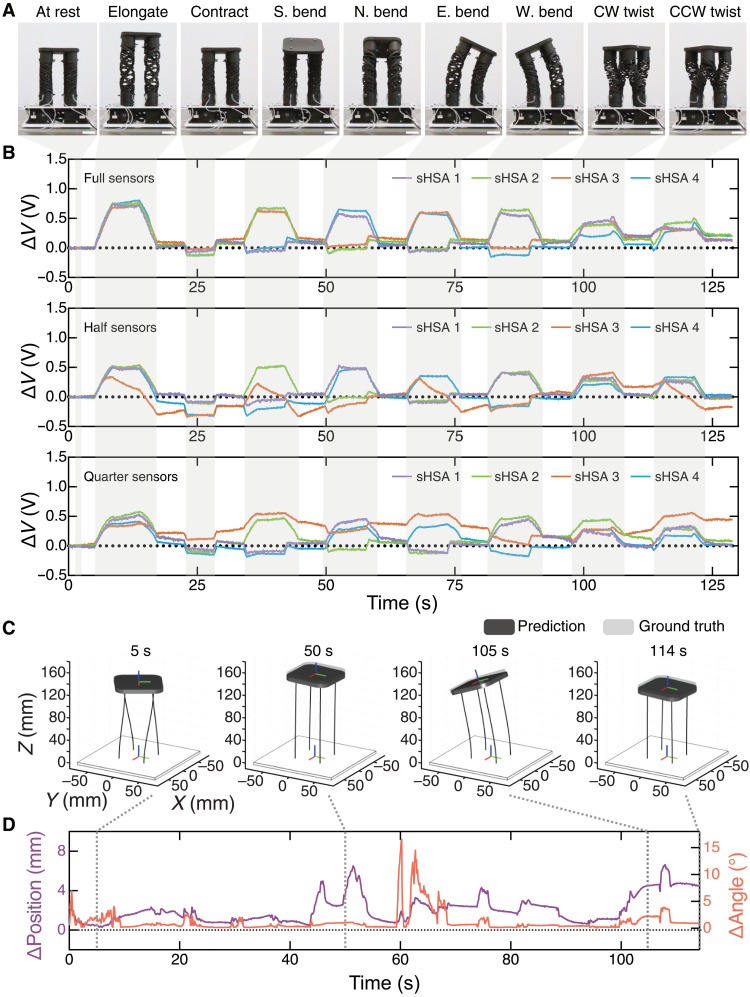
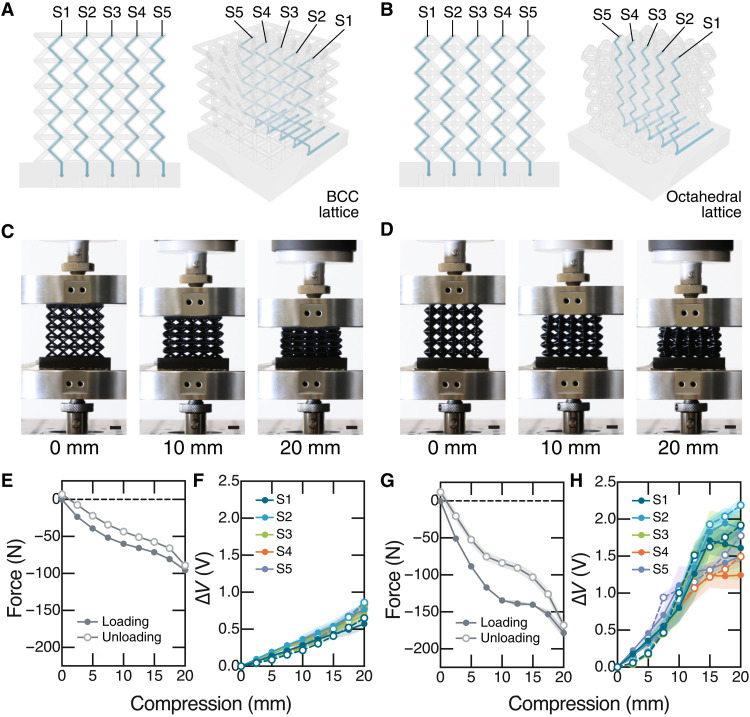
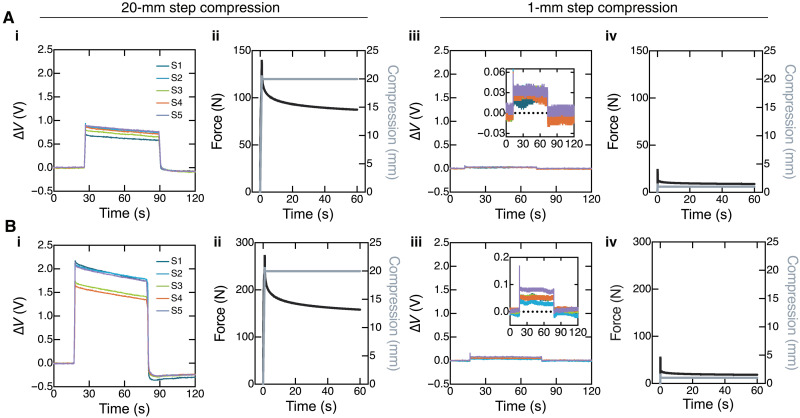
Multifunctional materials with distributed sensing and programmed mechanical properties are required for myriad emerging technologies. However, current fabrication techniques constrain these materials' design and sensing capabilities. We address these needs with a method for sensorizing architected materials through fluidic innervation, where distributed networks of empty, air-filled channels are directly embedded within an architected material's sparse geometry. By measuring pressure changes within these channels, we receive feedback regarding material deformation. Thus, this technique allows for three-dimensional printing of sensorized structures from a single material. With this strategy, we fabricate sensorized soft robotic actuators on the basis of handed shearing auxetics and accurately predict their kinematics from the sensors' proprioceptive feedback using supervised learning. Our strategy for facilitating structural, sensing, and actuation capabilities through control of form alone simplifies sensorized material design for applications spanning wearables, smart structures, and robotics.
众多新兴技术都需要具有分布式传感和可编程机械性能的多功能材料。然而,当前的制造技术限制了这些材料的设计和传感能力。我们通过一种流体神经支配的方法来满足这些需求,即将空的、充满空气的通道分布式网络直接嵌入到结构化材料的稀疏几何结构中,从而实现对结构化材料的传感功能。通过测量这些通道内的压力变化,我们可以获得有关材料变形的反馈。因此,该技术允许使用单一材料对传感结构进行三维打印。利用这一策略,我们基于手性剪切变密度材料制造了传感软机器人致动器,并使用监督学习从传感器的本体感受反馈中准确预测其运动学。我们仅通过控制形状来促进结构、传感和驱动能力的策略,简化了可穿戴设备、智能结构和机器人等应用中的传感材料设计。