HYBRID Team, INCIA, CNRS, UMR 5287, Bordeaux, France.
Unité de Physiologie de l'Exercice et des Activités en Conditions Extrêmes,Département Environnements Opérationnels, Institut de Recherche Biomédicale des Armées, Brétigny, France.
J Neuroeng Rehabil. 2022 Jun 11;19(1):59. doi: 10.1186/s12984-022-01038-y.
Current myoelectric prostheses lack proprioceptive information and rely on vision for their control. Sensory substitution is increasingly developed with non-invasive vibrotactile or electrotactile feedback, but most systems are designed for grasping or object discriminations, and few were tested for online control in amputees. The objective of this work was evaluate the effect of a novel vibrotactile feedback on the accuracy of myoelectric control of a virtual elbow by healthy subjects and participants with an upper-limb amputation at humeral level.
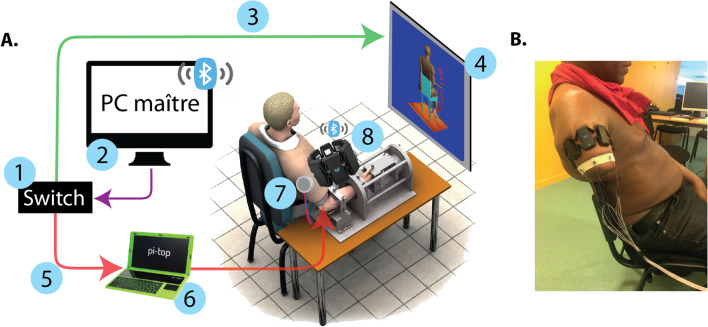
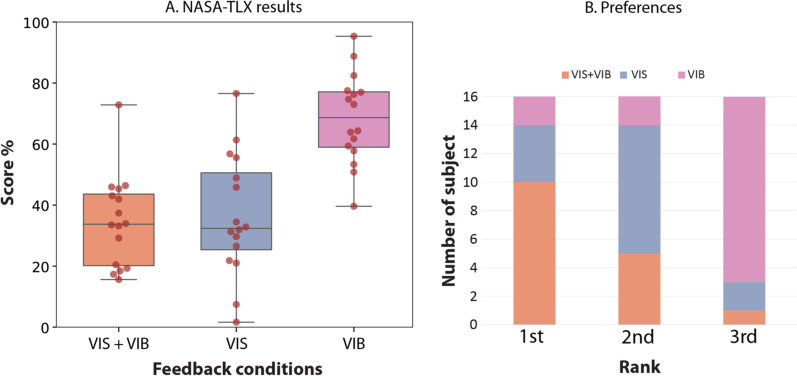
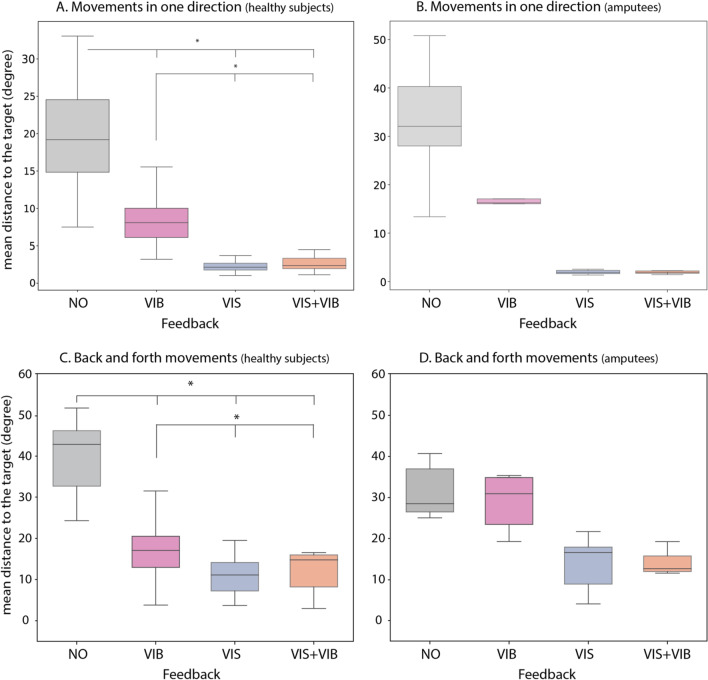
Sixteen, healthy participants and 7 transhumeral amputees performed myoelectric control of a virtual arm under different feedback conditions: vision alone (VIS), vibration alone (VIB), vision plus vibration (VIS + VIB), or no feedback at all (NO). Reach accuracy was evaluated by angular errors during discrete as well as back and forth movements. Healthy participants' workloads were assessed with the NASA-TLX questionnaire, and feedback conditions were ranked according to preference at the end of the experiment.
Reach errors were higher in NO than in VIB, indicating that our vibrotactile feedback improved performance as compared to no feedback. Conditions VIS and VIS+VIB display similar levels of performance and produced lower errors than in VIB. Vision remains therefore critical to maintain good performance, which is not ameliorated nor deteriorated by the addition of vibrotactile feedback. The workload associated with VIB was higher than for VIS and VIS+VIB, which did not differ from each other. 62.5% of healthy subjects preferred the VIS+VIB condition, and ranked VIS and VIB second and third, respectively.
Our novel vibrotactile feedback improved myoelectric control of a virtual elbow as compared to no feedback. Although vision remained critical, the addition of vibrotactile feedback did not improve nor deteriorate the control and was preferred by participants. Longer training should improve performances with VIB alone and reduce the need of vision for close-loop prosthesis control.
目前的肌电假肢缺乏本体感觉信息,依赖于视觉进行控制。随着非侵入性的振动触觉或电触觉反馈技术的不断发展,感觉替代技术得到了广泛应用,但大多数系统都是为抓握或物体识别而设计的,很少有针对上肢截肢者的在线控制进行测试。本研究的目的是评估一种新型振动触觉反馈对健康受试者和肱骨水平上肢截肢者使用肌电控制虚拟肘部的准确性的影响。
16 名健康参与者和 7 名肱骨截肢者在不同的反馈条件下进行了虚拟手臂的肌电控制:仅视觉(VIS)、仅振动(VIB)、视觉加振动(VIS+VIB)或完全无反馈(NO)。通过离散运动和前后运动期间的角度误差评估到达准确性。健康参与者的工作量通过 NASA-TLX 问卷进行评估,并在实验结束时根据偏好对反馈条件进行排名。
与 VIB 相比,NO 条件下的到达误差更高,这表明与无反馈相比,我们的振动触觉反馈提高了性能。VIS 和 VIS+VIB 条件的性能相似,产生的误差低于 VIB。因此,视觉仍然是保持良好性能的关键,而添加振动触觉反馈既不会改善也不会恶化性能。与 VIS 和 VIS+VIB 相比,VIB 相关的工作量更高,而 VIS 和 VIS+VIB 之间没有差异。62.5%的健康受试者更喜欢 VIS+VIB 条件,其次是 VIS 和 VIB。
与无反馈相比,我们的新型振动触觉反馈提高了虚拟肘部的肌电控制性能。尽管视觉仍然是关键,但添加振动触觉反馈既没有改善也没有恶化控制,并且受到参与者的青睐。更长时间的训练应该可以提高单独使用 VIB 的性能,并减少闭环假肢控制对视觉的需求。