Di Natali Christian, Sadeghi Ali, Mondini Alessio, Bottenberg Eliza, Hartigan Bernard, De Eyto Adam, O'Sullivan Leonard, Rocon Eduardo, Stadler Konrad, Mazzolai Barbara, Caldwell Darwin G, Ortiz Jesús
XoLab, Department of ADVR-IIT Advanced Robotics, Istituto Italiano di Tecnologia, Genoa, Italy.
Department of Biomechanical Engineering, University of Twente, Enschede, Netherlands.
Front Neurorobot. 2020 Jun 30;14:31. doi: 10.3389/fnbot.2020.00031. eCollection 2020.
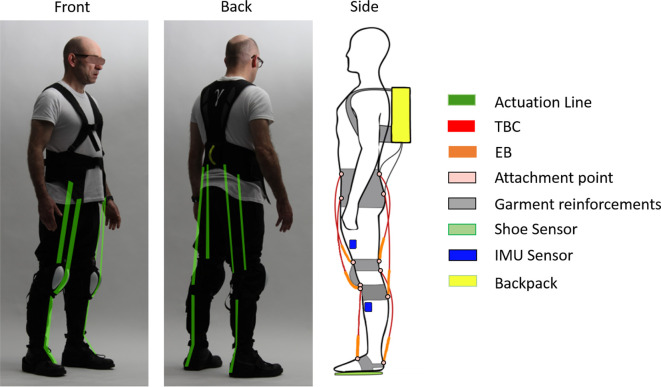
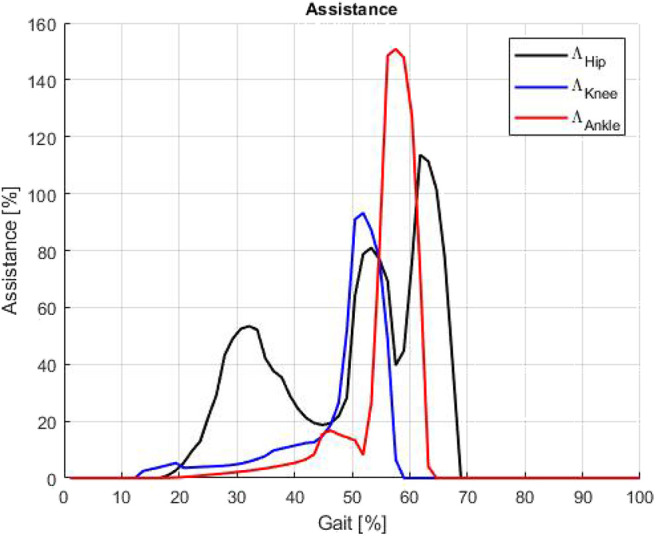
There is a growing international interest in developing soft wearable robotic devices to improve mobility and daily life autonomy as well as for rehabilitation purposes. Usability, comfort and acceptance of such devices will affect their uptakes in mainstream daily life. The XoSoft EU project developed a modular soft lower-limb exoskeleton to assist people with low mobility impairments. This paper presents the bio-inspired design of a soft, modular exoskeleton for lower limb assistance based on pneumatic quasi-passive actuation. The design of a modular reconfigurable prototype and its performance are presented. This actuation centers on an active mechanical element to modulate the assistance generated by a traditional passive component, in this case an elastic belt. This study assesses the feasibility of this type of assistive device by evaluating the energetic outcomes on a healthy subject during a walking task. Human-exoskeleton interaction in relation to task-based biological power assistance and kinematics variations of the gait are evaluated. The resultant assistance, in terms of overall power ratio (Λ) between the exoskeleton and the assisted joint, was 26.6% for hip actuation, 9.3% for the knee and 12.6% for the ankle. The released maximum power supplied on each articulation, was 113.6% for the hip, 93.2% for the knee, and 150.8% for the ankle.
开发可穿戴软机器人设备以改善行动能力和日常生活自主性以及用于康复目的,在国际上越来越受到关注。此类设备的可用性、舒适性和接受度将影响其在主流日常生活中的应用。XoSoft欧盟项目开发了一种模块化软下肢外骨骼,以帮助行动能力低下的人。本文介绍了一种基于气动准被动驱动的用于下肢辅助的软模块化外骨骼的仿生设计。介绍了模块化可重构原型的设计及其性能。这种驱动以一个主动机械元件为中心,来调节由传统被动部件(在这种情况下是一条弹性带)产生的辅助力。本研究通过评估健康受试者在步行任务期间的能量输出,来评估这种类型辅助设备的可行性。评估了与基于任务的生物动力辅助和步态运动学变化相关的人机外骨骼相互作用。就外骨骼与被辅助关节之间的总功率比(Λ)而言,髋关节驱动的合力为26.6%,膝关节为9.3%,踝关节为12.6%。每个关节释放的最大功率,髋关节为113.6%,膝关节为93.2%,踝关节为150.8%。