Electronic Engineering Department, Sir Syed University of Engineering & Technology, Karachi 75300, Pakistan.
Department of Computer Science, College of Computers and Information Technology, Taif University, P.O. Box 11099, Taif 21944, Saudi Arabia.
Sensors (Basel). 2022 Jul 19;22(14):5395. doi: 10.3390/s22145395.
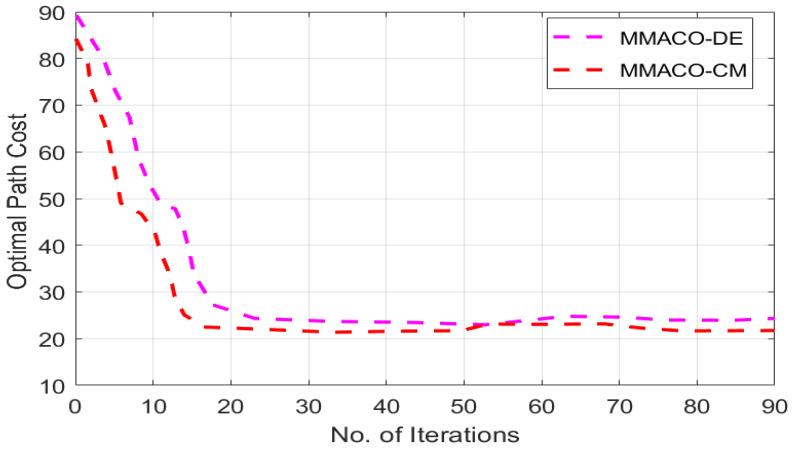
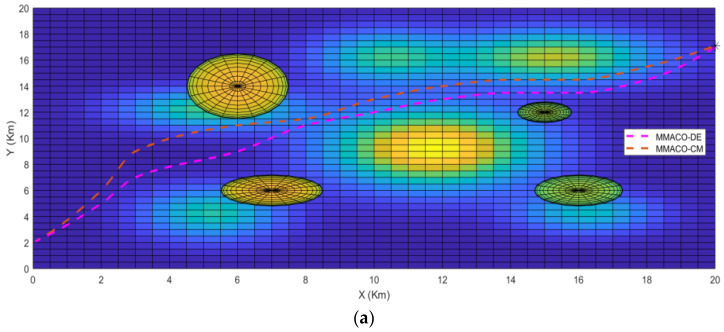
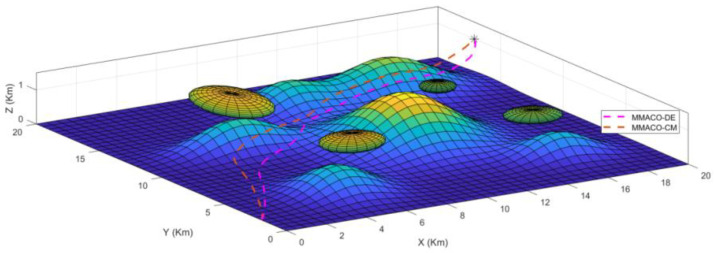
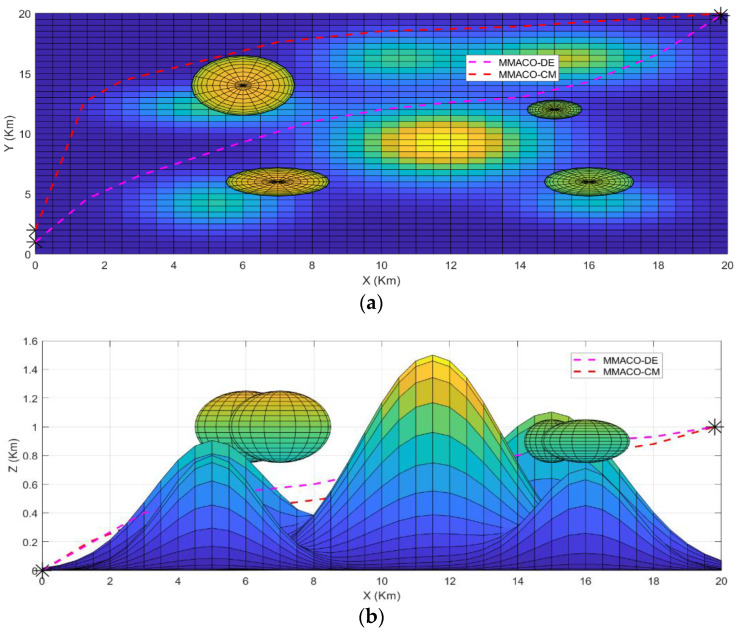
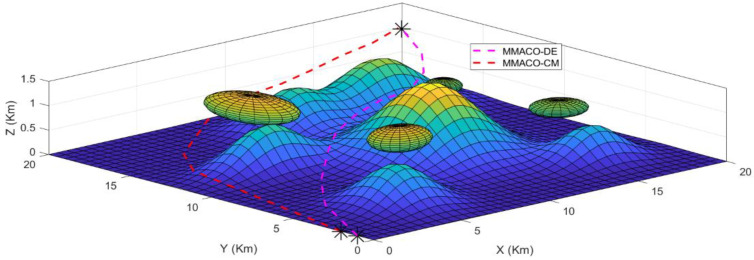
Unmanned Aerial Vehicles (UAVs) seem to be the most efficient way of achieving the intended aerial tasks, according to recent improvements. Various researchers from across the world have studied a variety of UAV formations and path planning methodologies. However, when unexpected obstacles arise during a collective flight, path planning might get complicated. The study needs to employ hybrid algorithms of bio-inspired computations to address path planning issues with more stability and speed. In this article, two hybrid models of Ant Colony Optimization were compared with respect to convergence time, i.e., the Max-Min Ant Colony Optimization approach in conjunction with the Differential Evolution and Cauchy mutation operators. Each algorithm was run on a UAV and traveled a predetermined path to evaluate its approach. In terms of the route taken and convergence time, the simulation results suggest that the MMACO-DE technique outperforms the MMACO-CM approach.
根据最近的改进,无人驾驶飞行器 (UAV) 似乎是实现预期空中任务的最有效方式。来自世界各地的各种研究人员已经研究了各种 UAV 编队和路径规划方法。然而,当集体飞行中出现意外障碍物时,路径规划可能会变得复杂。这项研究需要采用生物启发计算的混合算法来解决具有更高稳定性和速度的路径规划问题。在本文中,比较了两种基于蚁群优化的混合模型,即与差分进化和柯西变异算子相结合的最大最小蚁群优化方法。每个算法都在一架 UAV 上运行,并行驶预定的路径来评估其方法。就所采取的路线和收敛时间而言,模拟结果表明,MMACO-DE 技术优于 MMACO-CM 方法。