School of Computing and Digital Technology, Birmingham City University, Birmingham B4 7XG, UK.
Sensors (Basel). 2022 Jul 23;22(15):5497. doi: 10.3390/s22155497.
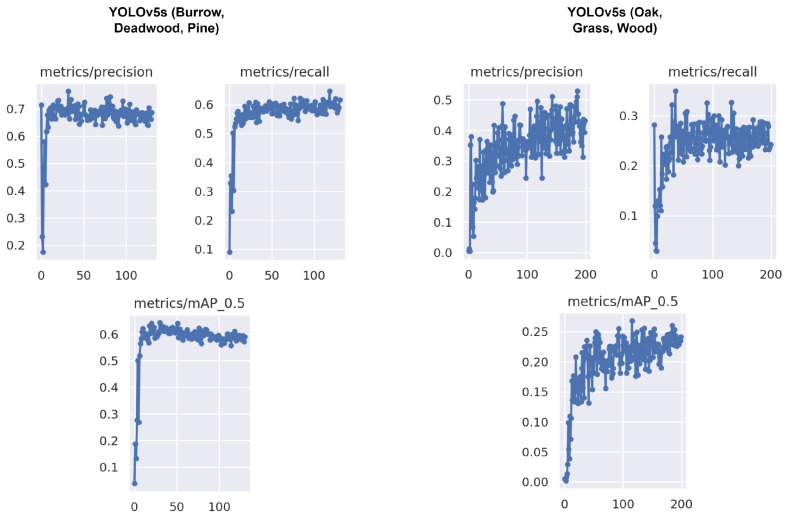
Accurate and timely monitoring is imperative to the resilience of forests for economic growth and climate regulation. In the UK, forest management depends on citizen science to perform tedious and time-consuming data collection tasks. In this study, an unmanned aerial vehicle (UAV) equipped with a light sensor and positioning capabilities is deployed to perform aerial surveying and to observe a series of forest health indicators (FHIs) which are inaccessible from the ground. However, many FHIs such as burrows and deadwood can only be observed from under the tree canopy. Hence, we take the initiative of employing a quadruped robot with an integrated camera as well as an external sensing platform (ESP) equipped with light and infrared cameras, computing, communication and power modules to observe these FHIs from the ground. The forest-monitoring time can be extended by reducing computation and conserving energy. Therefore, we analysed different versions of the YOLO object-detection algorithm in terms of accuracy, deployment and usability by the EXP to accomplish an extensive low-latency detection. In addition, we constructed a series of new datasets to train the YOLOv5x and YOLOv5s for recognising FHIs. Our results reveal that YOLOv5s is lightweight and easy to train for FHI detection while performing close to real-time, cost-effective and autonomous forest monitoring.
准确、及时的监测对于森林的经济增长和气候调节的恢复力至关重要。在英国,森林管理依赖于公民科学来执行繁琐和耗时的数据收集任务。在这项研究中,一架配备有光传感器和定位能力的无人机 (UAV) 被部署用于进行航空勘测,并观察一系列无法从地面获得的森林健康指标 (FHIs)。然而,许多 FHIs,如洞穴和枯木,只能从树冠下观察到。因此,我们主动采用了一种带有集成摄像头的四足机器人,以及一个带有光和红外摄像头、计算、通信和电源模块的外部感应平台 (ESP),以便从地面观察这些 FHIs。通过减少计算和节约能源,可以延长森林监测时间。因此,我们分析了不同版本的 YOLO 目标检测算法在准确性、部署和 EXP 的可用性方面的表现,以实现广泛的低延迟检测。此外,我们构建了一系列新的数据集来训练 YOLOv5x 和 YOLOv5s 以识别 FHIs。我们的结果表明,YOLOv5s 是轻量级的,易于训练,用于 FHI 检测,同时能够接近实时、经济高效和自主地进行森林监测。