Department of Psychology, University of California, Berkeley, Berkeley, United States.
Helen Wills Neuroscience Institute, University of California, Berkeley, Berkeley, United States.
Elife. 2022 Aug 15;11:e76639. doi: 10.7554/eLife.76639.
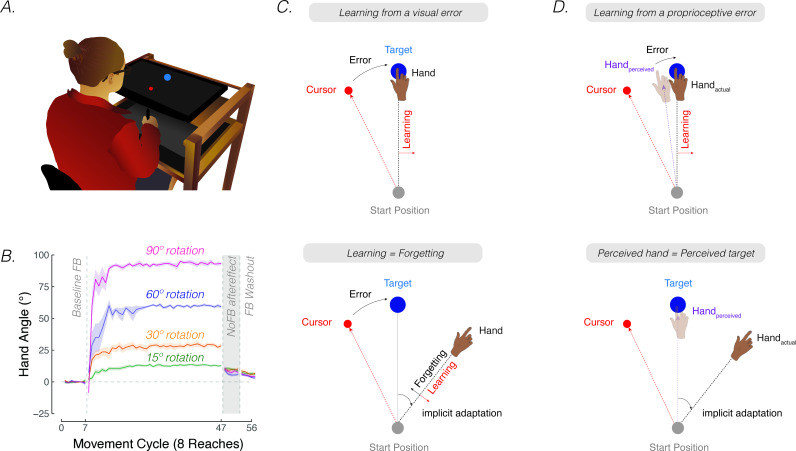
Multiple learning processes contribute to successful goal-directed actions in the face of changing physiological states, biomechanical constraints, and environmental contexts. Amongst these processes, implicit sensorimotor adaptation is of primary importance, ensuring that movements remain well-calibrated and accurate. A large body of work on reaching movements has emphasized how adaptation centers on an iterative process designed to minimize visual errors. The role of proprioception has been largely neglected, thought to play a passive role in which proprioception is affected by the visual error but does not directly contribute to adaptation. Here, we present an alternative to this visuo-centric framework, outlining a model in which implicit adaptation acts to minimize a proprioceptive error, the distance between the perceived hand position and its intended goal. This proprioceptive re-alignment model (PReMo) is consistent with many phenomena that have previously been interpreted in terms of learning from visual errors, and offers a parsimonious account of numerous unexplained phenomena. Cognizant that the evidence for PReMo rests on correlational studies, we highlight core predictions to be tested in future experiments, as well as note potential challenges for a proprioceptive-based perspective on implicit adaptation.
多种学习过程有助于在不断变化的生理状态、生物力学限制和环境背景下成功地进行目标导向的行动。在这些过程中,内隐感觉运动适应是最重要的,它确保运动保持良好的校准和准确性。大量关于伸手动作的研究强调了适应如何集中在一个迭代过程上,该过程旨在最小化视觉误差。本体感觉的作用在很大程度上被忽视了,被认为在其中起着被动的作用,即本体感觉受到视觉误差的影响,但不会直接有助于适应。在这里,我们提出了一种替代这种以视觉为中心的框架,概述了一种模型,其中内隐适应作用是最小化本体感觉误差,即感知到手的位置与其预期目标之间的距离。这种本体感觉重新调整模型(PReMo)与许多以前根据视觉误差进行解释的现象一致,并为许多未解释的现象提供了一种简洁的解释。我们意识到 PReMo 的证据依赖于相关研究,因此强调了未来实验中需要测试的核心预测,并指出了从本体感觉角度看待内隐适应的潜在挑战。