Ophthalmology Unit, Fondazione Policlinico Universitario A. Gemelli IRCCS, Rome, Italy.
Ophthalmology Unit, Università Cattolica del Sacro Cuore, Rome, Italy.
Transl Vis Sci Technol. 2022 Aug 1;11(8):13. doi: 10.1167/tvst.11.8.13.
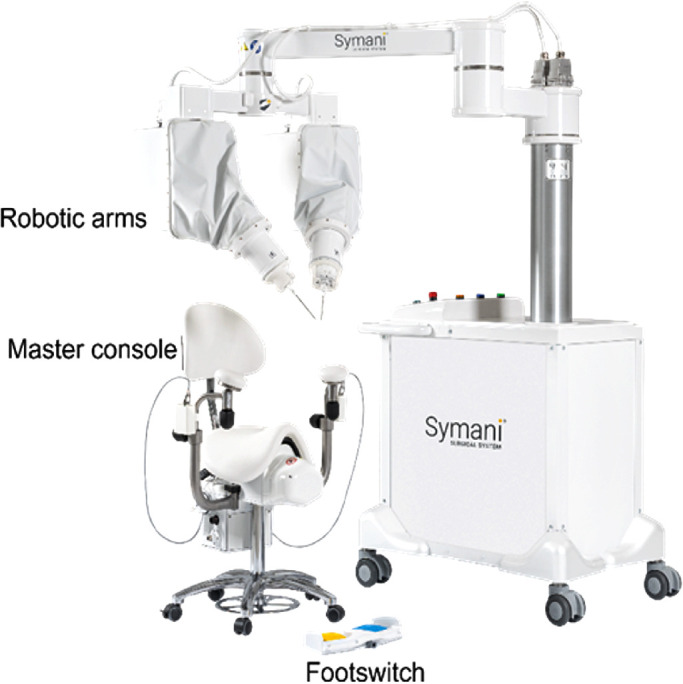
This study investigated the feasibility and potential advantage of using a new microsurgical teleoperated robot, Symani Surgical System, in the ophthalmology field. In particular, considering the extreme precision of the system and the dexterity of the instrument, possible use of the Symani Surgical System has been explored for suturing in corneal graft surgery.
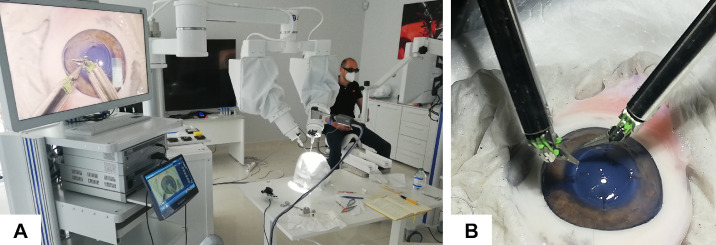
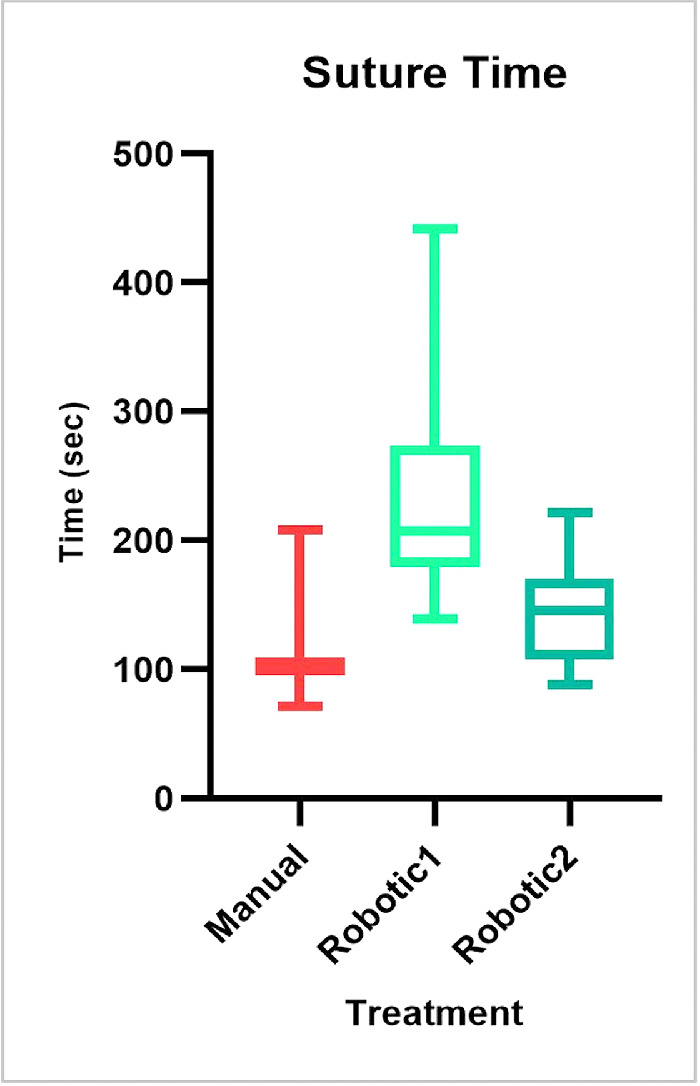
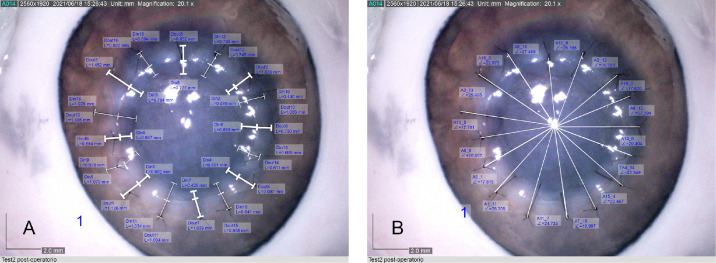
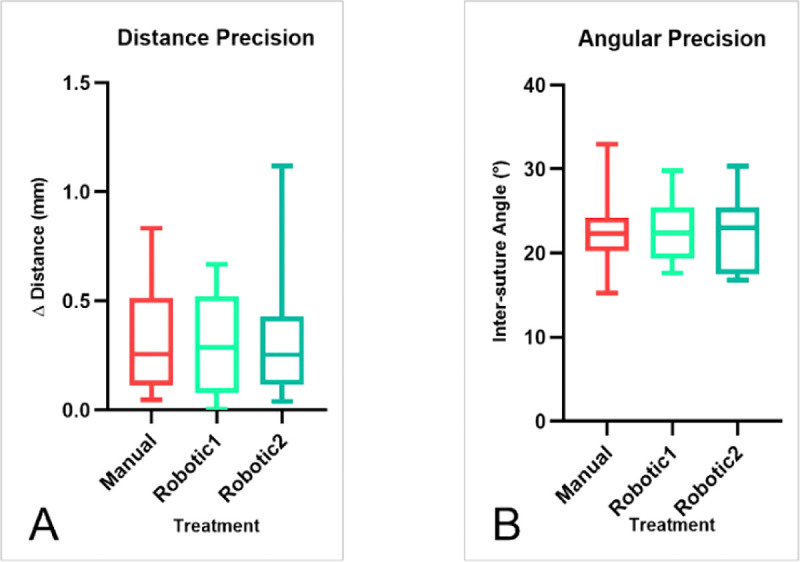
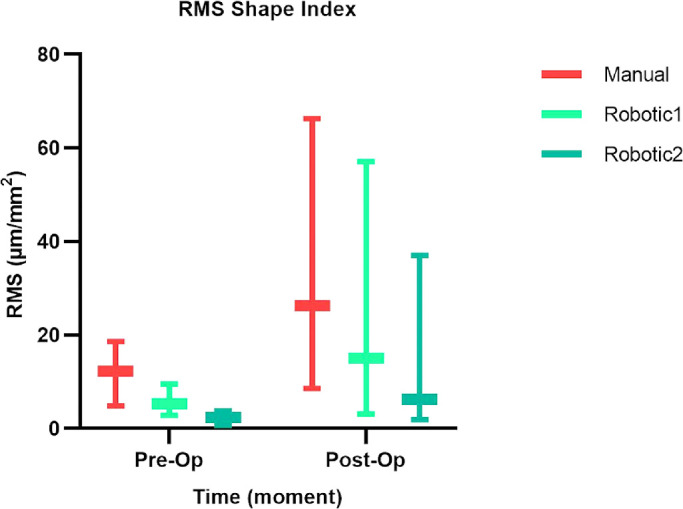
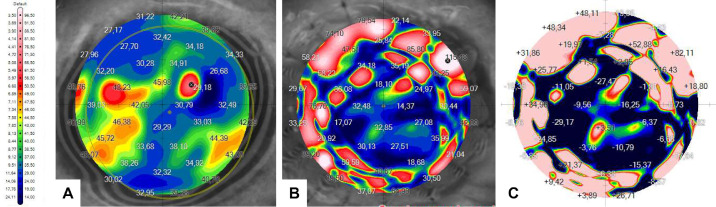
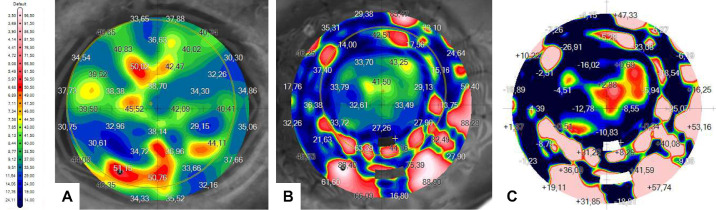
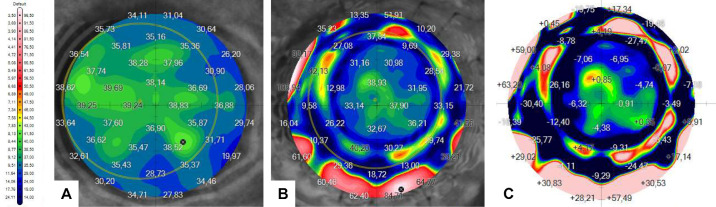
Manual and robot-assisted suturing of partial corneal transplants was performed on the porcine eye model by an ophthalmologist with experience with the porcine model. Suturing execution time, suture placement, and tomographic parameters were analyzed to assess the regularity and distribution of corneal sutures for both manual and robotic treatment.
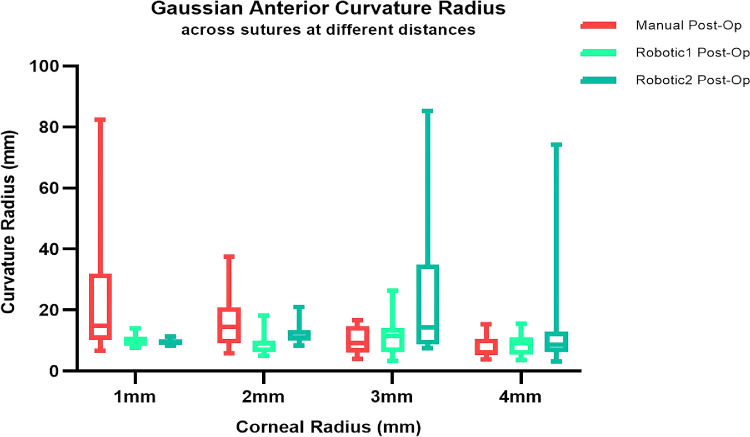
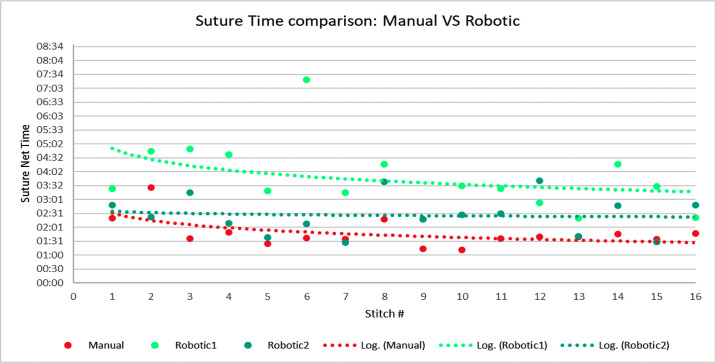
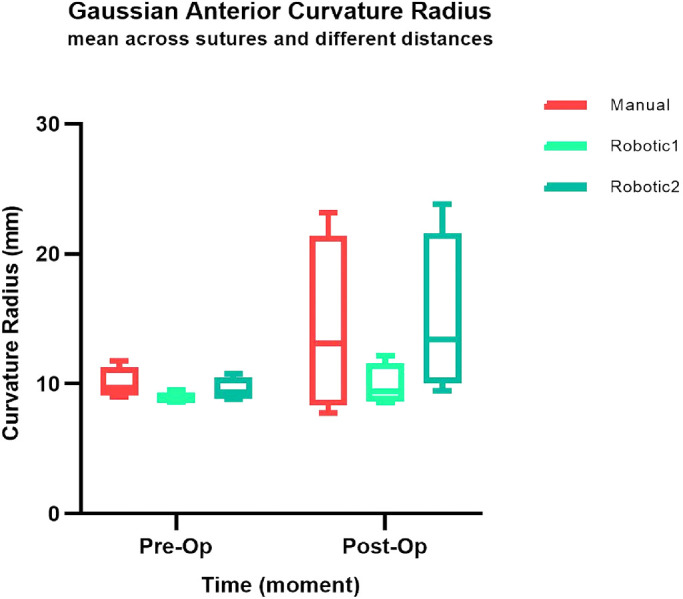
The two robot-assisted procedures were properly completed on the porcine model, confirming the ease of use of the system and its capabilities, as well as the dexterity of the microinstruments. Manual and robotic treatments were found to be equivalent in terms of distance and angular precision of suture placement and corneal surface regularity (Gaussian anterior curvature). The robotic procedure required longer suturing execution times compared with the manual procedure.
The technical and clinical feasibility of robot-assisted suturing of partial corneal graft using the Symani Surgical System has been confirmed for the first time, to our knowledge, using an ex vivo porcine model. Robotic suturing required longer time to complete but was equivalent to the manual procedure with regard to the imaging data collected.
This study evaluated the use of the Symani Surgical System in the ophthalmology field. Future investigations could further identify the advantages offered by the stability, dexterity, and motion precision of the system for corneal surgeries, paving the way for clinical use in both adult and even more challenging pediatric therapy.
本研究旨在探讨新型显微手术远程操作机器人 Symani Surgical System 在眼科领域应用的可行性和潜在优势。具体而言,鉴于该系统的极高精度和器械的灵巧性,探索了 Symani Surgical System 在角膜移植手术中缝合的可能用途。
有猪眼模型经验的眼科医生对手动和机器人辅助部分角膜移植的缝合进行了操作。分析缝合执行时间、缝线位置和断层参数,以评估手动和机器人治疗的角膜缝线的规律性和分布。
两个机器人辅助手术在猪模型上均成功完成,证实了该系统易于使用及其功能,以及微器械的灵巧性。在缝线位置的距离和角度精度以及角膜表面规则性(高斯前曲率)方面,手动和机器人治疗方法相当。与手动手术相比,机器人手术的缝合执行时间更长。
据我们所知,这是首次使用离体猪模型证实了 Symani Surgical System 辅助部分角膜移植物机器人缝合的技术和临床可行性。机器人缝合需要更长的时间来完成,但在收集的成像数据方面与手动程序相当。
翻译的准确性取决于原文的质量和清晰度。如果原文中存在拼写或语法错误,翻译结果可能会受到影响。