Litinas Krisanne, Roenigk Kristen L, Daly Janis J
Cognitive and Motor Learning Laboratory, Louis Stokes VA Medical Center, Cleveland, OH 44106, USA.
Brain Rehabilitation Research Center, Malcom Randall VA Medical Center, Gainesville, FL 32608, USA.
Brain Sci. 2022 Aug 2;12(8):1026. doi: 10.3390/brainsci12081026.
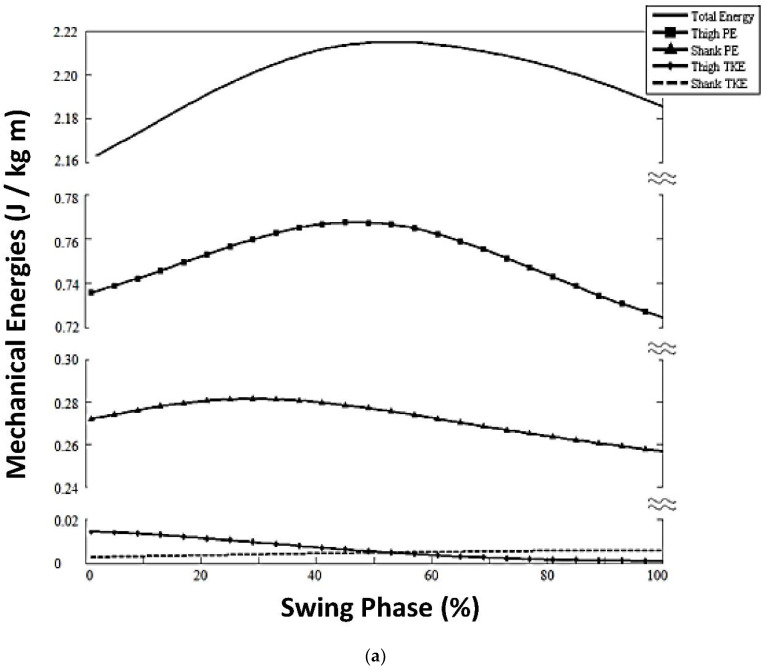
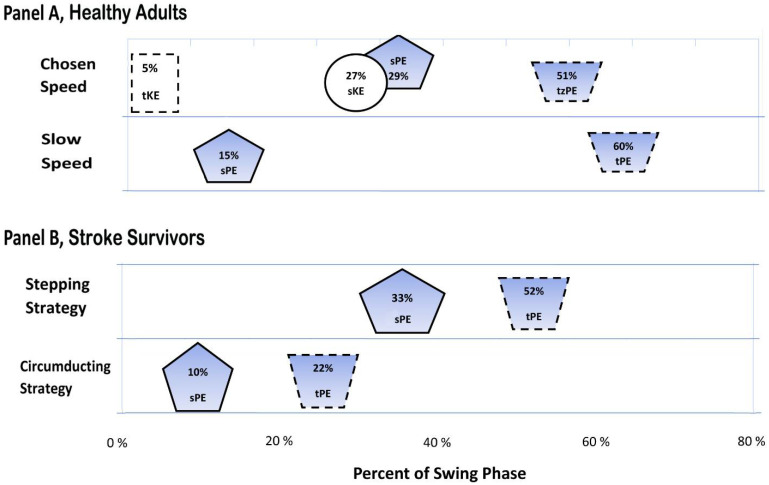
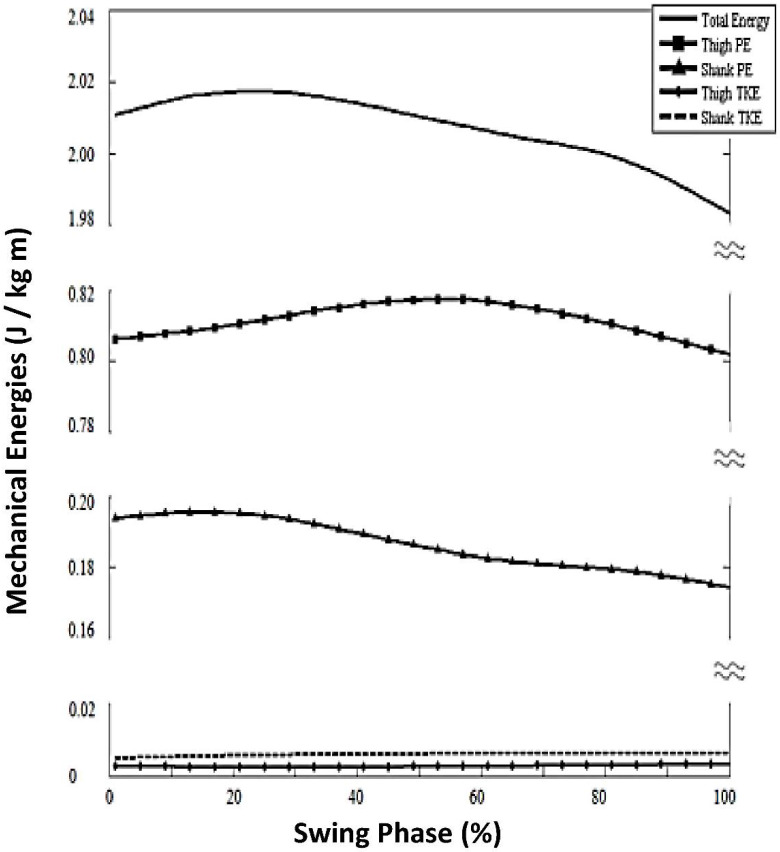
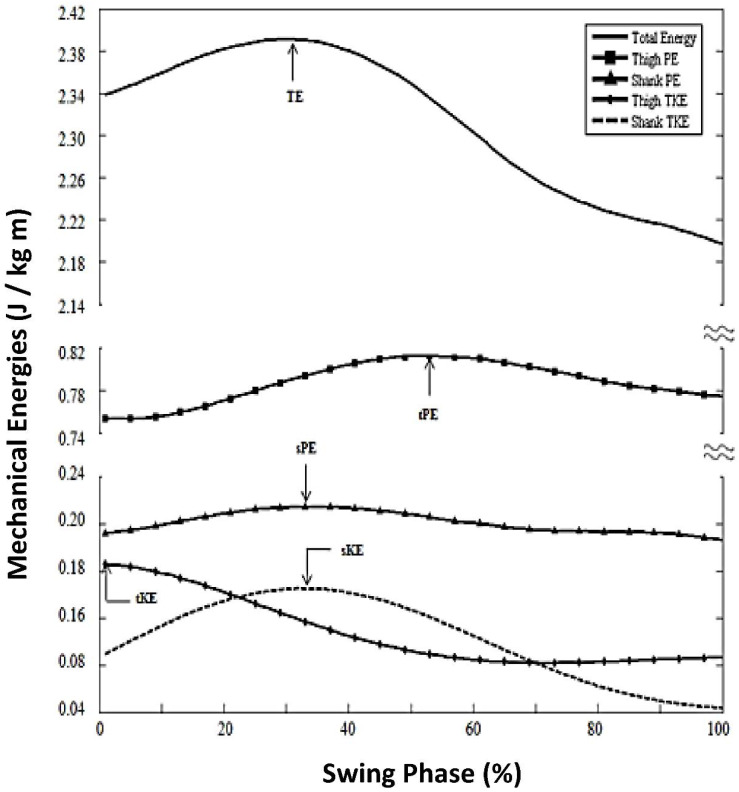
Background/Problem. Given the treatment-resistant gait deficits after stroke and known elevated energy cost of gait after stroke, it is important to study the patterns of mechanical energies of the lower limb segments. There is a dearth of information regarding mechanical energies specifically for the thigh and shank across the gait cycle. Therefore, the purpose of the current work was to characterize the following: (1) relative patterns of oscillation kinetic energy (KE) and potential energy (PE) within lower limb segments and across lower limb segments in healthy adults during the swing phase at chosen and slow gait speeds; (2) KE and PE swing phase patterns and values for stroke survivors versus healthy adults walking at slow speed; and (3) KE and PE patterns during the swing phase for two different compensatory gait strategies after stroke,. Methods. This was a gait characterization study, a two-group, parallel-cohort study of fourteen stroke survivors with gait deficits, walking at <0.4 m/s and eight adults with no gait deficits. For testing, the eight healthy adults walked at their chosen speed, and then at the imposed slow speed of <0.04 m/s. We used a standard motion capture system and calculation methods to acquire, calculate, and characterize oscillation patterns of KE and PE of the limb segments (thigh and shank) across the gait cycle. Results. In healthy adults, we identified key energy conservation mechanisms inherent in the interactions of KE and PE, both within the thigh and shank segments and across those limb segments, partially explaining the low cost of energy of the normal adult chosen speed gait pattern, and the underlying mechanism affording the known minimal set of activated muscles during walking, especially during the early swing phase. In contrast, KE was effectively absent for both healthy adults at imposed slow walking speed and stroke survivors at their very slow chosen speed, eliminating the normal conservation of energy between KE and PE within the thigh and across the thigh and shank. Moreover, and in comparison to healthy adult slow speed, stroke survivors exhibited greater abnormalities in mechanical energies patterns, reflected in either a compensatory stepping strategy (over-flexing the hip) or circumducting strategy (stiff-legged gait, with knee extended throughout the swing phase). Conclusions and contribution to the field. Taken together, these findings support targeted training to restore normal balance control and normal activation and de-activation coordination of hip, knee, and ankle muscles, respectively (agonist/antagonist at each joint), so as to eliminate the known post-stroke abnormal co-contractions; this motor training is critical in order to release the limb to swing normally in response to mechanical energies and afford the use of conservation of KE and PE energies within the thigh and across thigh and shank.
背景/问题。鉴于中风后存在难以治疗的步态缺陷,且已知中风后步态的能量消耗增加,研究下肢各节段机械能的模式很重要。目前缺乏关于整个步态周期中大腿和小腿机械能的具体信息。因此,本研究的目的是描述以下内容:(1)健康成年人在选定的和较慢的步态速度下摆动期内下肢各节段以及下肢各节段之间的振荡动能(KE)和势能(PE)的相对模式;(2)中风幸存者与以慢速行走的健康成年人的KE和PE摆动期模式及数值;(3)中风后两种不同代偿性步态策略在摆动期的KE和PE模式。方法。这是一项步态特征研究,是一项两组平行队列研究,纳入了14名有步态缺陷、行走速度<0.4米/秒的中风幸存者和8名无步态缺陷的成年人。测试时,8名健康成年人先以自己选择的速度行走,然后以规定的<0.04米/秒的慢速行走。我们使用标准运动捕捉系统和计算方法来获取、计算并描述整个步态周期中肢体节段(大腿和小腿)的KE和PE振荡模式。结果。在健康成年人中,我们确定了KE和PE相互作用中固有的关键能量守恒机制,该机制存在于大腿和小腿节段内以及这些肢体节段之间,部分解释了正常成年人选定速度步态模式能量消耗低的原因,以及在行走过程中,尤其是在摆动初期已知的激活肌肉最少的潜在机制。相比之下,在规定的慢速行走速度下的健康成年人以及中风幸存者以其非常慢的选定速度行走时,KE实际上都不存在,这消除了大腿内以及大腿和小腿之间KE和PE之间正常的能量守恒。此外,与健康成年人的慢速行走相比,中风幸存者在机械能模式上表现出更大的异常,表现为代偿性迈步策略(过度屈曲髋关节)或划圈步态策略(僵硬腿步态,在整个摆动期膝关节伸直)。结论及对该领域的贡献。综上所述,这些发现支持进行有针对性的训练,以分别恢复正常的平衡控制以及髋、膝和踝关节肌肉的正常激活和去激活协调(每个关节的主动肌/拮抗肌),从而消除已知的中风后异常共同收缩;这种运动训练对于使肢体能够响应机械能正常摆动,并利用大腿内以及大腿和小腿之间的KE和PE能量守恒至关重要。