Ahmed Foisal, Jenihhin Maksim
Department of Computer Systems, Tallinn University of Technology, 12618 Tallinn, Estonia.
Sensors (Basel). 2022 Aug 21;22(16):6286. doi: 10.3390/s22166286.
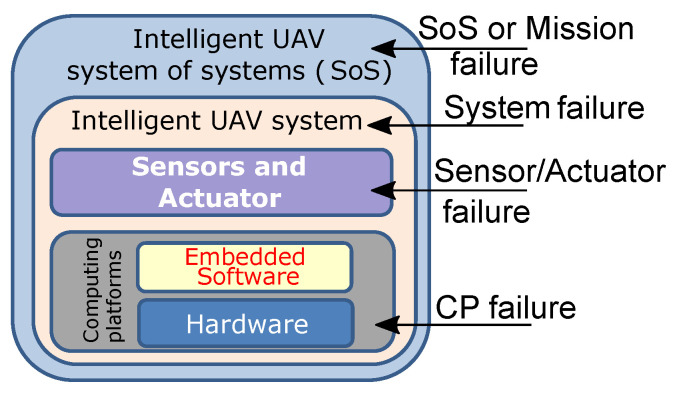
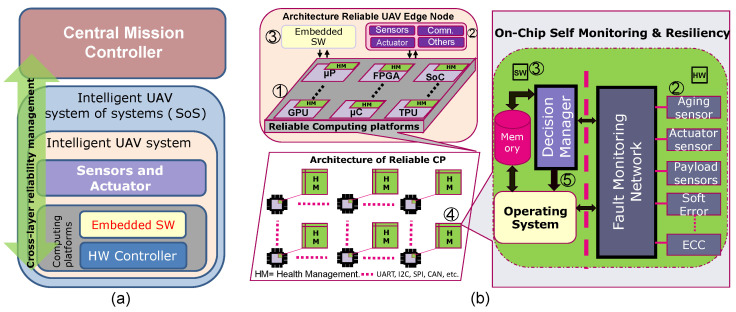
This study describes the Computing Platforms (CPs) and the hardware reliability issues of Unmanned Aerial Vehicles (UAVs), or drones, which recently attracted significant attention in mission and safety-critical applications demanding a failure-free operation. While the rapid development of the UAV technologies was recently reviewed by survey reports focusing on the architecture, cost, energy efficiency, communication, and civil application aspects, the computing platforms' reliability perspective was overlooked. Moreover, due to the rising complexity and diversity of today's UAV CPs, their reliability is becoming a prominent issue demanding up-to-date solutions tailored to the UAV specifics. The objective of this work is to address this gap, focusing on the hardware reliability aspect. This research studies the UAV CPs deployed for representative applications, specific fault and failure modes, and existing approaches for reliability assessment and enhancement in CPs for failure-free UAV operation. This study indicates how faults and failures occur in the various system layers of UAVs and analyzes open challenges. We advocate a concept of a cross-layer reliability model tailored to UAVs' onboard intelligence and identify directions for future research in this area.
本研究描述了无人驾驶飞行器(UAV)或无人机的计算平台(CP)及其硬件可靠性问题,无人机最近在要求无故障运行的任务和安全关键型应用中引起了广泛关注。虽然最近的调查报告对无人机技术的快速发展进行了综述,重点关注其架构、成本、能源效率、通信和民用应用等方面,但计算平台的可靠性视角却被忽视了。此外,由于当今无人机计算平台的复杂性和多样性不断增加,其可靠性正成为一个突出问题,需要针对无人机的具体情况提供最新的解决方案。这项工作的目标是填补这一空白,重点关注硬件可靠性方面。本研究探讨了用于代表性应用的无人机计算平台、特定的故障和失效模式,以及现有用于无人机无故障运行的计算平台可靠性评估和增强方法。这项研究指出了无人机各个系统层中故障和失效是如何发生的,并分析了面临的挑战。我们倡导一种针对无人机机载智能量身定制的跨层可靠性模型概念,并确定该领域未来的研究方向。