Gowri Vigneswari, Sethuramalingam Prabhu, Uma M
Department of Mechanical Engineering, SRM Institute of Science and Technology, Kattankulathur, Chennai 603203, India.
Department of Computational Intelligence, SRM Institute of Science and Technology, Kattankulathur, Chennai 603203, India.
Mater Today Proc. 2022;68:1980-1987. doi: 10.1016/j.matpr.2022.08.227. Epub 2022 Sep 20.
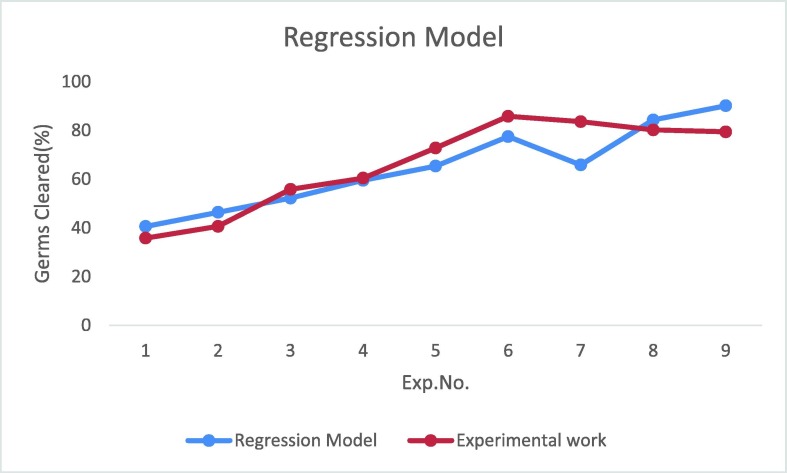
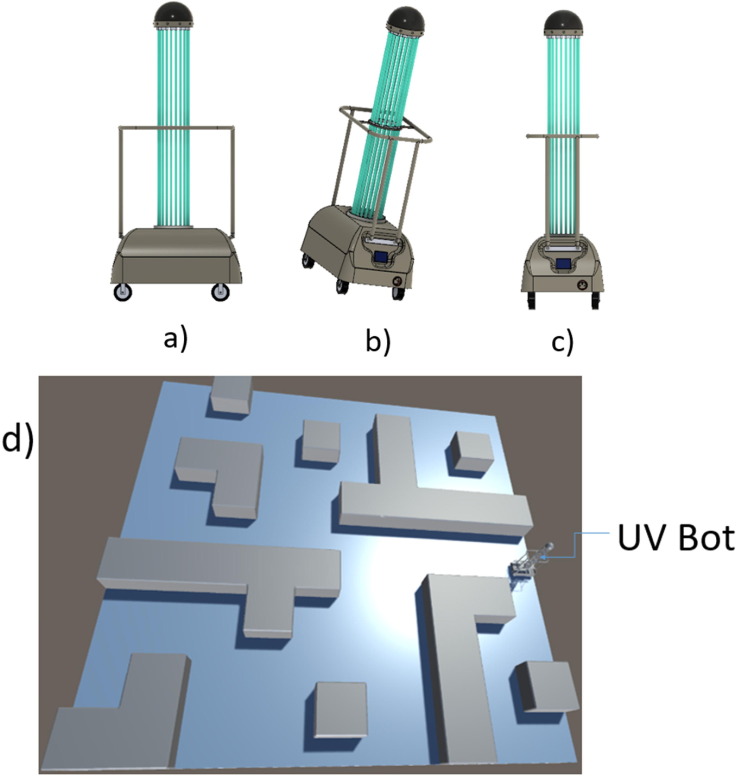
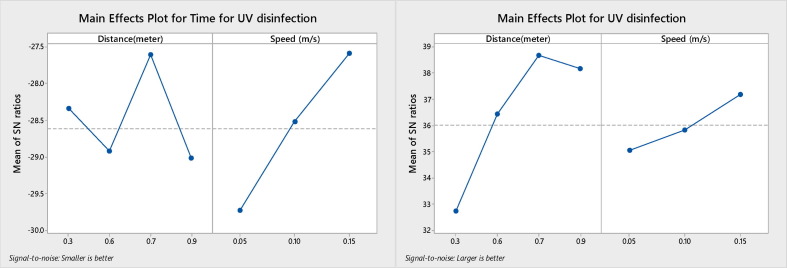
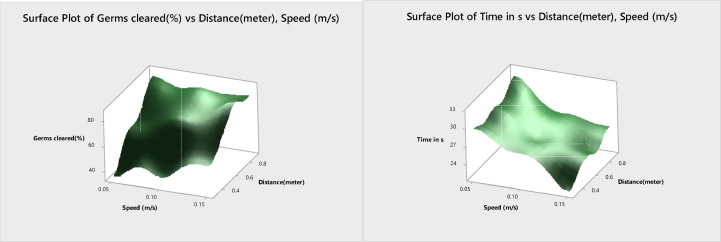
As a result of the COVID-19 epidemic, there is a growing demand for robots to perform various operations which include service bots, cleaning, and disinfection bots. Viral contamination has been one of the major causes of human fatality which has abruptly increased in this situation. Availability of existing technologies is always surpassed by an effective one so as is the UV-Bot developed in this project. This bot aims for a highly accurate percentage of up to 96.8% of germ clearance at pre-defined conditions which are user-friendly. Also, the robot is designed in a compact size and effective shape to achieve maximum efficiency. The robot is deployed in hospital pathway and rooms for disinfection whereas human detection and obstacle avoidance has been included with a custom-developed algorithm that supports autonomous navigation and corner tracking facility. The robot also supports live streaming of the disinfecting site with an emergency alarm and stop in human detection. This type of robot is highly capable of destroying viral infections at a particular point which is validated using Taguchi analysis and also the robot is 3D modelled and tested using static and dynamic obstacles. Thus UV-Bot is manually controllable or autonomous which uses the A* algorithm to store or retrieve the disinfecting site map which is recorded if used frequently.
由于新冠疫情,对机器人执行各种操作的需求日益增长,这些操作包括服务机器人、清洁机器人和消毒机器人。病毒污染一直是导致人类死亡的主要原因之一,在这种情况下,其发生率急剧上升。现有技术的可用性总是会被更有效的技术超越,本项目开发的紫外线消毒机器人就是如此。该机器人旨在在预定义的用户友好条件下实现高达96.8%的高精度杀菌率。此外,该机器人设计紧凑、形状高效,以实现最高效率。该机器人部署在医院通道和病房进行消毒,通过定制算法实现人体检测和避障功能,该算法支持自主导航和角落跟踪功能。该机器人还支持对消毒现场进行实时直播,并配备紧急警报和人体检测时停止工作的功能。这种类型的机器人在特定点具有高度的病毒感染破坏能力,这通过田口分析得到验证,并且该机器人使用静态和动态障碍物进行了3D建模和测试。因此,紫外线消毒机器人既可以手动控制,也可以自主运行,它使用A*算法来存储或检索消毒现场地图,如果经常使用,该地图会被记录下来。