Lou Mingzhao, Lu Jinke, Wang Le, Jiang Huanyu, Zhou Mingchuan
College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou, China.
Key Laboratory of Intelligent Equipment and Robotics for Agriculture of Zhejiang Province, Zhejiang University, Hangzhou, China.
Front Plant Sci. 2022 Sep 29;13:947690. doi: 10.3389/fpls.2022.947690. eCollection 2022.
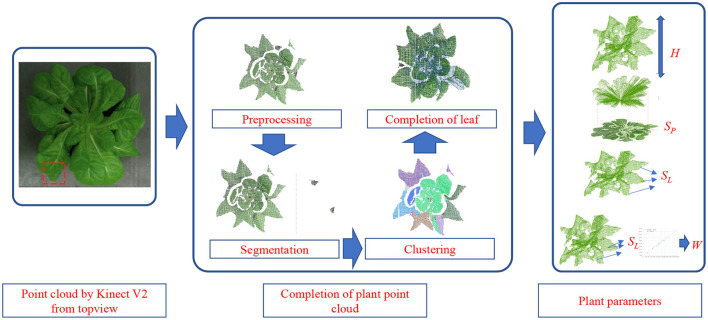
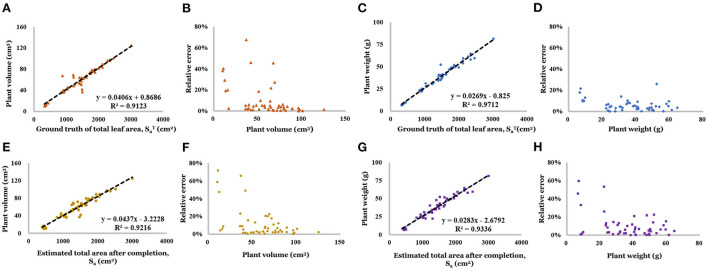
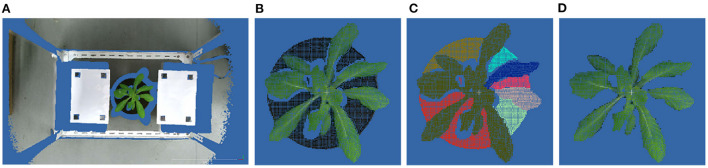
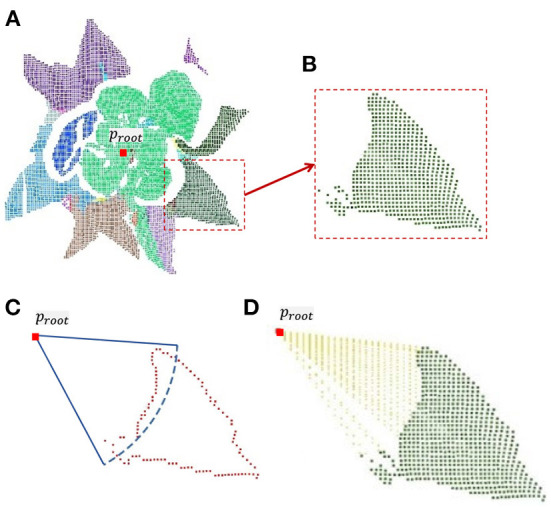
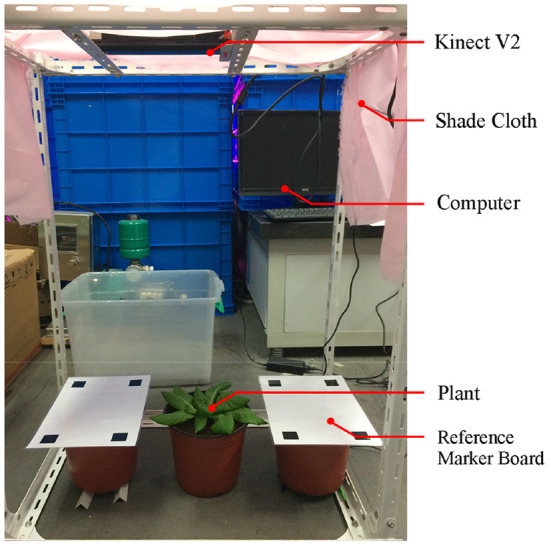
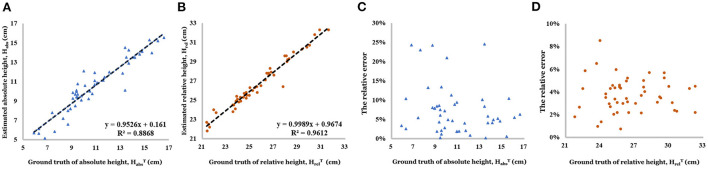
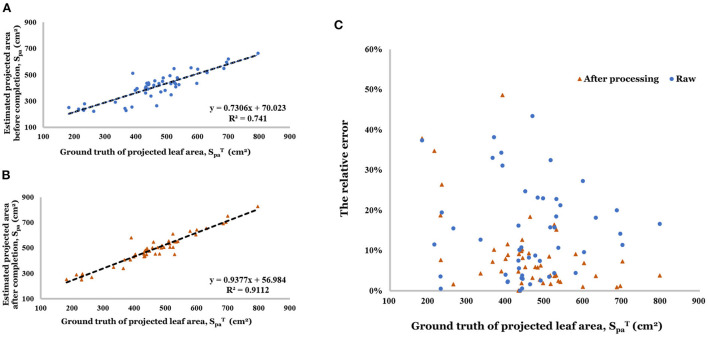
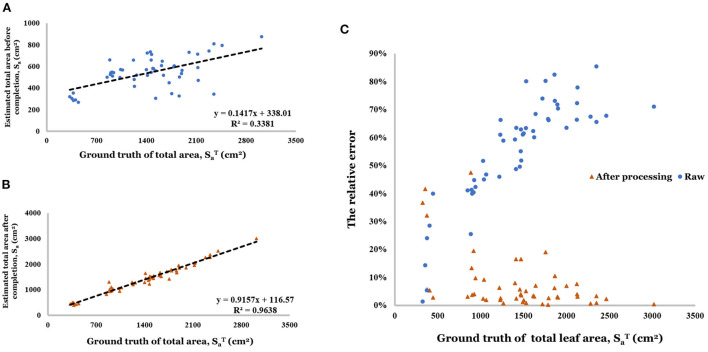
The plant factory is a form of controlled environment agriculture (CEA) which is offers a promising solution to the problem of food security worldwide. Plant growth parameters need to be acquired for process control and yield estimation in plant factories. In this paper, we propose a fast and non-destructive framework for extracting growth parameters. Firstly, ToF camera (Microsoft Kinect V2) is used to obtain the point cloud from the top view, and then the lettuce point cloud is separated. According to the growth characteristics of lettuce, a geometric method is proposed to complete the incomplete lettuce point cloud. The treated point cloud has a high linear correlation with the actual plant height ( = 0.961), leaf area ( = 0.964), and fresh weight ( = 0.911) with a significant improvement compared to untreated point cloud. The result suggests our proposed point cloud completion method have has the potential to tackle the problem of obtaining the plant growth parameters from a single 3D view with occlusion.
植物工厂是可控环境农业(CEA)的一种形式,它为全球粮食安全问题提供了一个有前景的解决方案。在植物工厂中,为了进行过程控制和产量估计,需要获取植物生长参数。在本文中,我们提出了一个用于提取生长参数的快速且无损的框架。首先,使用飞行时间相机(微软Kinect V2)从顶视图获取点云,然后分离出生菜点云。根据生菜的生长特性,提出了一种几何方法来完成不完整的生菜点云。处理后的点云与实际株高( = 0.961)、叶面积( = 0.964)和鲜重( = 0.911)具有高度线性相关性,与未处理的点云相比有显著改善。结果表明,我们提出的点云补全方法有潜力解决从单个存在遮挡的3D视图中获取植物生长参数的问题。