Department of Pharmacology-Physiology, Faculty of Medicine and Health Sciences, Centre de Recherche du CHUS, Université de Sherbrooke, Sherbrooke, Quebec, Canada.
Department of Neurobiology and Anatomy, College of Medicine, Drexel University, Philadelphia, Pennsylvania.
J Neurophysiol. 2022 Dec 1;128(6):1593-1616. doi: 10.1152/jn.00230.2022. Epub 2022 Nov 16.
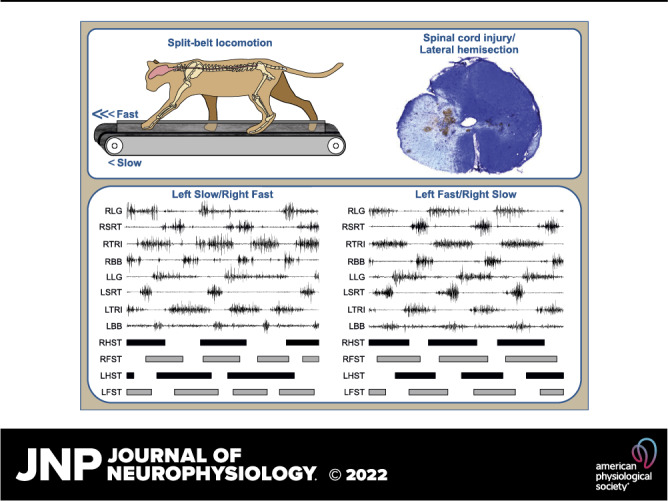
Most previous studies investigated the recovery of locomotion in animals and people with incomplete spinal cord injury (SCI) during relatively simple tasks (e.g., walking in a straight line on a horizontal surface or a treadmill). We know less about the recovery of locomotion after incomplete SCI in left-right asymmetric conditions, such as turning or stepping along circular trajectories. To investigate this, we collected kinematic and electromyography data during split-belt locomotion at different left-right speed differences before and after a right thoracic lateral spinal cord hemisection in nine adult cats. After hemisection, although cats still performed split-belt locomotion, we observed several changes in the gait pattern compared with the intact state at early (1-2 wk) and late (7-8 wk) time points. Cats with larger lesions showed new coordination patterns between the fore- and hindlimbs, with the forelimbs taking more steps. Despite this change in fore-hind coordination, cats maintained consistent phasing between the fore- and hindlimbs. Adjustments in cycle and phase (stance and swing) durations between the slow and fast sides allowed animals to maintain 1:1 left-right coordination. Periods of triple support involving the right (ipsilesional) hindlimb decreased in favor of quad support and triple support involving the other limbs. Step and stride lengths decreased with concurrent changes in the right fore- and hindlimbs, possibly to avoid interference. The above adjustments in the gait pattern allowed cats to retain the ability to locomote in asymmetric conditions after incomplete SCI. We discuss potential plastic neuromechanical mechanisms involved in locomotor recovery in these conditions. Everyday locomotion often involves left-right asymmetries, when turning, walking along circular paths, stepping on uneven terrains, etc. To show how incomplete spinal cord injury affects locomotor control in asymmetric conditions, we collected data before and after a thoracic lateral spinal hemisection on a split-belt treadmill with one side stepping faster than the other. We show that adjustments in kinematics and muscle activity allowed cats to retain the ability to perform asymmetric locomotion after hemisection.
大多数先前的研究调查了不完全性脊髓损伤 (SCI) 动物和人类在相对简单的任务(例如,在水平表面或跑步机上直线行走)中运动功能的恢复。我们对不完全性 SCI 后左右不对称条件下运动功能的恢复了解较少,例如转弯或沿圆形轨迹跨步。为了研究这一点,我们在 9 只成年猫的右侧胸外侧脊髓半切术前后,在不同的左右速度差异下收集了分带运动的运动学和肌电图数据。半切术后,尽管猫仍能进行分带运动,但与完整状态相比,我们在早期(1-2 周)和晚期(7-8 周)观察到步态模式发生了一些变化。病变较大的猫在前肢和后肢之间表现出新的协调模式,前肢迈出更多的步数。尽管前-后肢协调发生了这种变化,但猫在前后肢之间保持一致的相位。通过调整慢侧和快侧之间的周期和相位(支撑和摆动)持续时间,动物可以保持 1:1 的左右协调。涉及右侧(损伤侧)后肢的三支撑期减少,有利于四肢的四支撑期和三支撑期。步幅和步长随着左右前肢和后肢的同时变化而减小,可能是为了避免干扰。步态模式的上述调整使猫在不完全性 SCI 后仍能在不对称条件下保持运动能力。我们讨论了这些条件下运动功能恢复中涉及的潜在神经机械可塑性机制。日常行走通常涉及左右不对称,例如转弯、沿圆形路径行走、在不平坦的地形上行走等。为了展示不完全性脊髓损伤如何影响不对称条件下的运动控制,我们在分带跑步机上收集了胸外侧脊髓半切术前后的数据,一侧的步速快于另一侧。我们表明,运动学和肌肉活动的调整使猫在半切术后仍能保持不对称运动的能力。