University of Zagreb, Faculty of Electrical Engineering and Computing, Unska 3, 10000 Zagreb, Croatia.
Sensors (Basel). 2023 Jan 12;23(2):872. doi: 10.3390/s23020872.
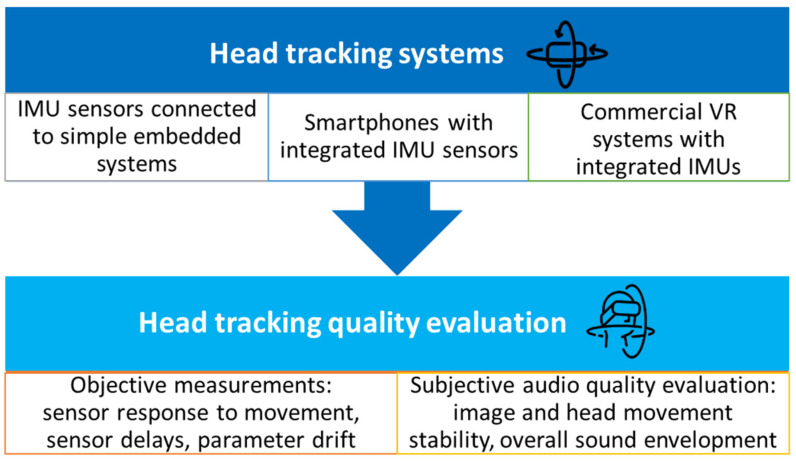
Binaural synthesis with head tracking is often used in spatial audio systems. The devices used for head tracking must provide data on the orientation of the listener's head. These data need to be highly accurate, and they need to be provided as fast and as frequently as possible. Therefore, head-tracking devices need to be equipped with high-quality inertial measurement unit (IMU) sensors. Since IMUs readily include triaxial accelerometers, gyroscopes, and magnetometers, it is crucial that all of these sensors perform well, as the head orientation is calculated from all sensor outputs. This paper discusses the challenges encountered in the process of the performance assessment of IMUs through appropriate measurements. Three distinct hardware platforms were investigated: five IMU sensors either connected to Arduino-based embedded systems or being an integral part of one, five smartphones across a broad range of overall quality with integrated IMUs, and a commercial virtual reality unit that utilizes a headset with integrated IMUs. An innovative measurement method is presented and proposed for comparing the performance of sensors on all three platforms. The results of the measurements performed using the proposed method show that all three investigated platforms are adequate for the acquisition of the data required for calculating the orientation of a device as the input to the binaural synthesis process. Some limitations that have been observed during the measurements, regarding data acquisition and transfer, are discussed.
双耳合成与头部跟踪通常用于空间音频系统。用于头部跟踪的设备必须提供听众头部方向的数据。这些数据需要高度准确,并尽可能快速和频繁地提供。因此,头部跟踪设备需要配备高质量的惯性测量单元 (IMU) 传感器。由于 IMU 通常包括三轴加速度计、陀螺仪和磁力计,因此所有这些传感器的性能都非常重要,因为头部方向是根据所有传感器输出计算得出的。本文通过适当的测量讨论了在 IMU 性能评估过程中遇到的挑战。研究了三个不同的硬件平台:五个要么连接到基于 Arduino 的嵌入式系统,要么作为其一部分的 IMU 传感器,五个具有集成 IMU 的整体质量范围广泛的智能手机,以及一个利用带有集成 IMU 的耳机的商业虚拟现实单元。提出并提出了一种创新的测量方法,用于比较三个平台上传感器的性能。使用提出的方法进行的测量结果表明,所有三个被调查的平台都足以获取用于计算设备方向的数据,作为双耳合成过程的输入。讨论了在测量过程中观察到的数据采集和传输方面的一些限制。