TeCIP Institute, Scuola Superiore Sant'Anna, 56127 Pisa, Italy.
German Research Center for Artificial Intelligence, 67663 Kaiserslautern, Germany.
Sensors (Basel). 2017 Jun 1;17(6):1257. doi: 10.3390/s17061257.
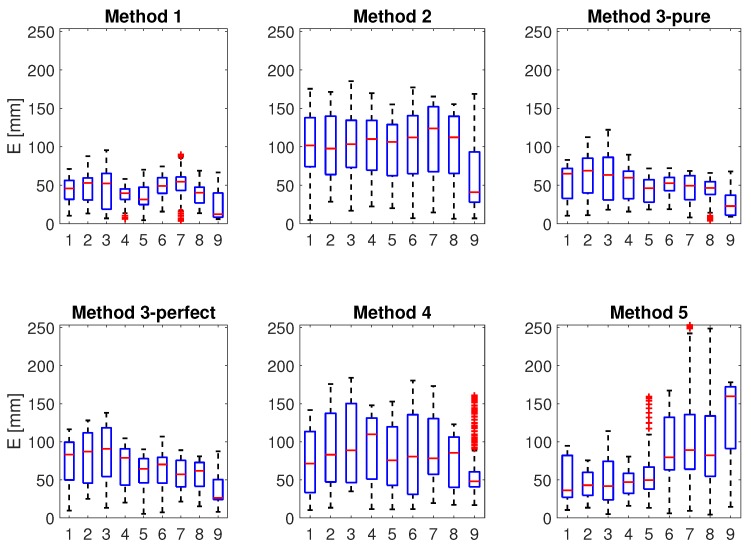
Motion tracking based on commercial inertial measurements units (IMUs) has been widely studied in the latter years as it is a cost-effective enabling technology for those applications in which motion tracking based on optical technologies is unsuitable. This measurement method has a high impact in human performance assessment and human-robot interaction. IMU motion tracking systems are indeed self-contained and wearable, allowing for long-lasting tracking of the user motion in situated environments. After a survey on IMU-based human tracking, five techniques for motion reconstruction were selected and compared to reconstruct a human arm motion. IMU based estimation was matched against motion tracking based on the Vicon marker-based motion tracking system considered as ground truth. Results show that all but one of the selected models perform similarly (about 35 mm average position estimation error).
近年来,基于商业惯性测量单元(IMU)的运动跟踪技术得到了广泛的研究,因为它是一种具有成本效益的技术,适用于那些基于光学技术的运动跟踪不适用的应用。这种测量方法在人体性能评估和人机交互中具有很高的影响力。IMU 运动跟踪系统确实是独立的和可穿戴的,允许在实际环境中长时间跟踪用户的运动。在对基于 IMU 的人体跟踪进行调查之后,选择了五种运动重建技术并进行了比较,以重建人体手臂运动。基于 IMU 的估计与基于 Vicon 标记的运动跟踪系统的运动跟踪相匹配,后者被认为是真实值。结果表明,所选模型中除了一个之外,其他模型的性能都相似(平均位置估计误差约为 35 毫米)。