RMIT Centre for Additive Manufacturing, RMIT University, Melbourne, Australia.
Translational Research and Animal Clinical Trial Study Group (TRACTS), Faculty of Veterinary and Agricultural Sciences, University of Melbourne, Melbourne, Australia.
Int J Comput Assist Radiol Surg. 2023 Oct;18(10):1783-1793. doi: 10.1007/s11548-023-02848-8. Epub 2023 Mar 1.
Bone tumours must be surgically excised in one piece with a margin of healthy tissue. The unique nature of each bone tumour case is well suited to the use of patient-specific implants, with additive manufacturing allowing production of highly complex geometries. This work represents the first assessment of the combination of surgical robotics and patient-specific additively manufactured implants.
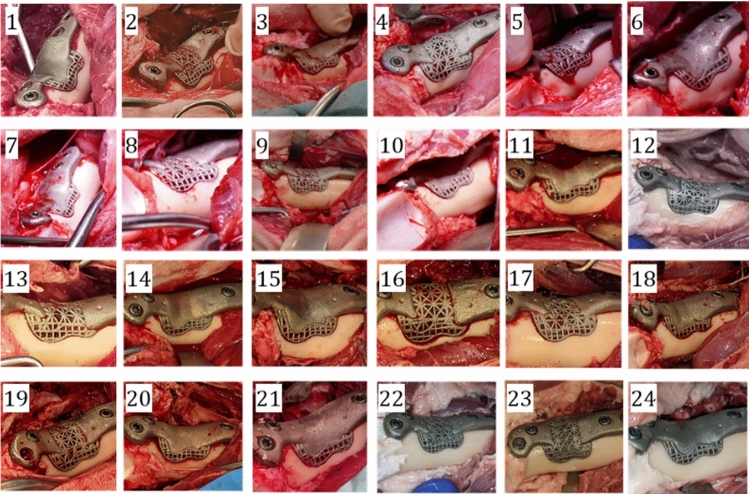
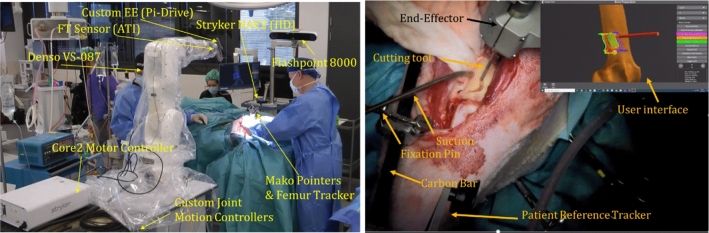
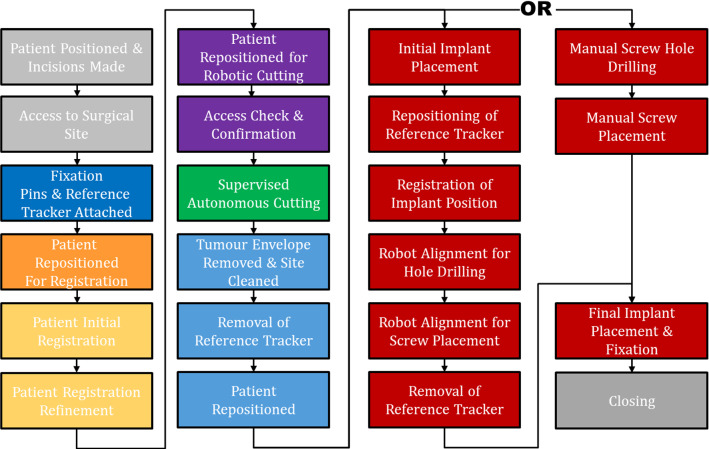
The development and evaluation of a robotic system for bone tumour excision, capable of milling complex osteotomy paths, is described. The developed system was evaluated as part of an animal trial on 24 adult male sheep, in which robotic bone excision of the distal femur was followed by placement of patient-specific implants with operative time evaluated. Assessment of implant placement accuracy was completed based on post-operative CT scans.
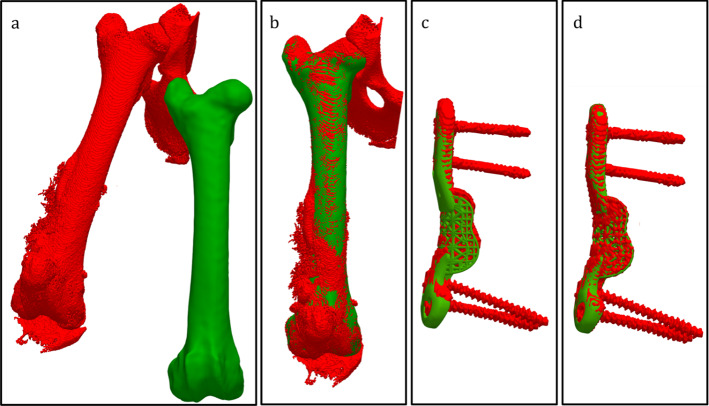
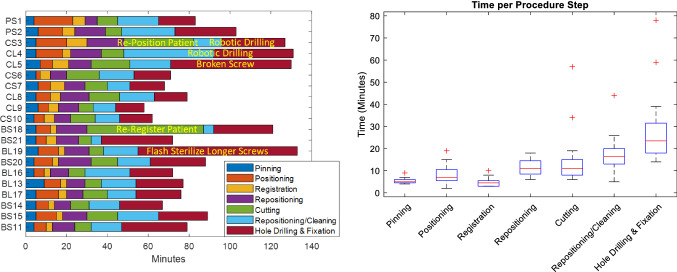
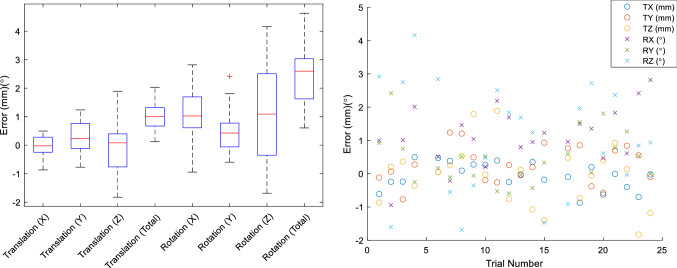
A mean overall implant position error of 1.05 ± 0.53 mm was achieved, in combination with a mean orientation error of 2.38 ± 0.98°. A mean procedure time (from access to implantation, excluding opening and closing) of 89.3 ± 25.25 min was observed, with recorded surgical time between 58 and 133 min, with this approximately evenly divided between robotic (43.9 ± 15.32) and implant-based (45.4 ± 18.97) tasks.
This work demonstrates the ability for robotics to achieve repeatable and precise removal of complex bone volumes of the type that would allow en bloc removal of a bone tumour. These robotically created volumes can be precisely filled with additively manufactured patient-specific implants, with minimal gap between cut surface and implant interface.
骨肿瘤必须整块切除,同时切除健康组织的边缘。每个骨肿瘤病例的独特性质非常适合使用患者特异性植入物,增材制造允许生产高度复杂的几何形状。这项工作代表了手术机器人和患者特异性增材制造植入物结合的首次评估。
描述了一种用于骨肿瘤切除的机器人系统的开发和评估,该系统能够铣削复杂的截骨路径。所开发的系统作为 24 只成年雄性绵羊动物试验的一部分进行了评估,其中机器人切除股骨远端,然后放置患者特异性植入物,并评估手术时间。基于术后 CT 扫描完成了植入物放置准确性的评估。
总体上实现了 1.05±0.53mm 的平均植入物位置误差,同时实现了 2.38±0.98°的平均方向误差。观察到平均手术时间(从进入到植入,不包括打开和关闭)为 89.3±25.25 分钟,记录的手术时间在 58 至 133 分钟之间,机器人(43.9±15.32)和植入物(45.4±18.97)任务之间几乎平分。
这项工作证明了机器人能够重复和精确地切除复杂的骨体积,从而允许整块切除骨肿瘤。这些机器人制造的体积可以用增材制造的患者特异性植入物精确填充,切除表面和植入物界面之间的间隙最小。