Haider Arsalan, Pigniczki Marcell, Koyama Shotaro, Köhler Michael H, Haas Lukas, Fink Maximilian, Schardt Michael, Nagase Koji, Zeh Thomas, Eryildirim Abdulkadir, Poguntke Tim, Inoue Hideo, Jakobi Martin, Koch Alexander W
Institute for Driver Assistance Systems and Connected Mobility (IFM), Kempten University of Applied Sciences, Junkersstrasse 1A, 87734 Benningen, Germany.
Institute for Measurement Systems and Sensor Technology, Technical University of Munich, Theresienstrasse 90, 80333 Munich, Germany.
Sensors (Basel). 2023 Aug 3;23(15):6891. doi: 10.3390/s23156891.
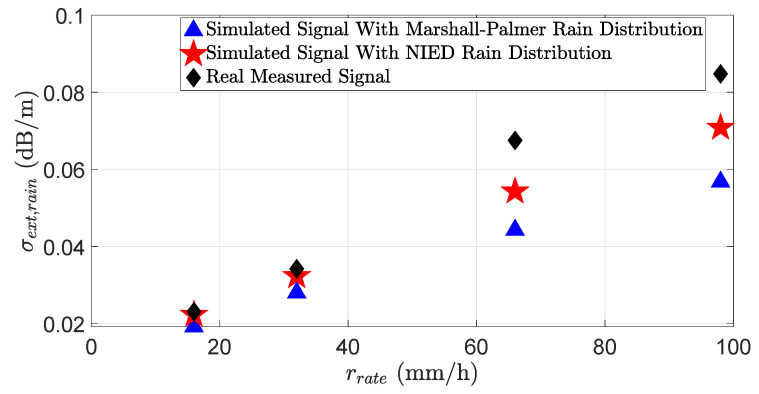
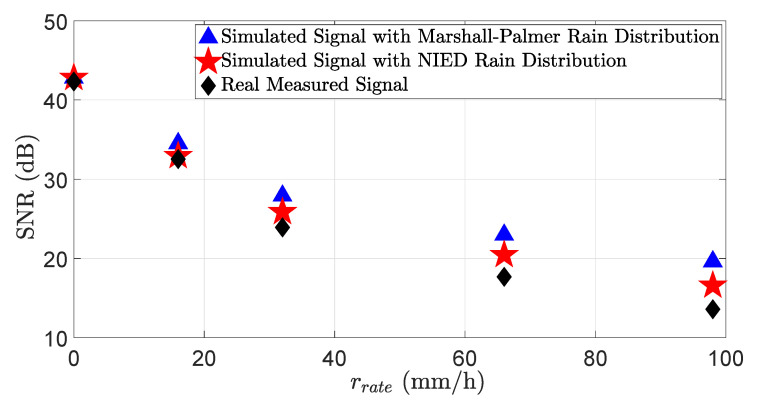
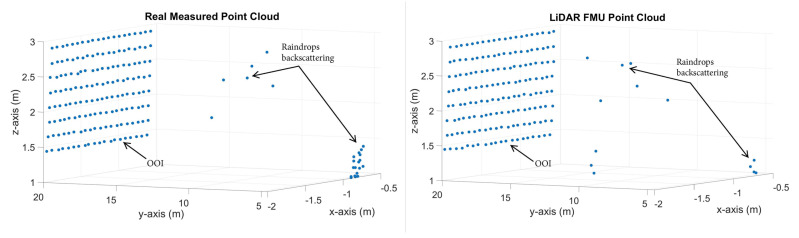
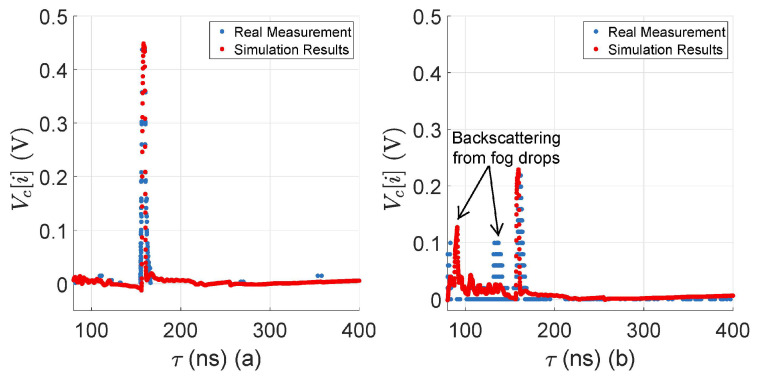
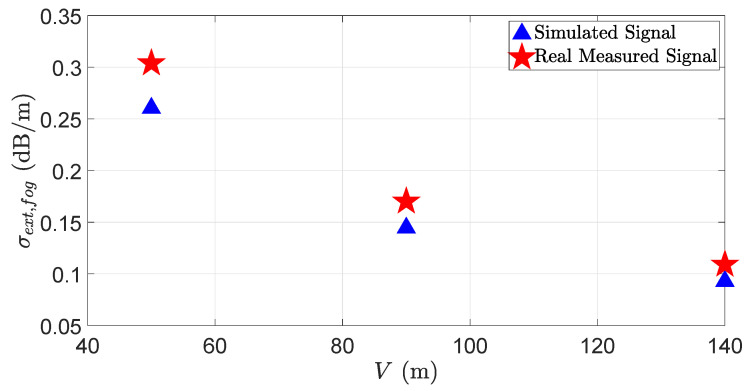
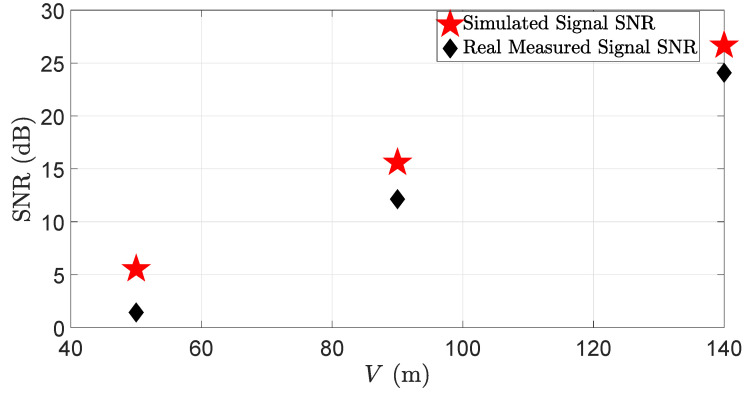
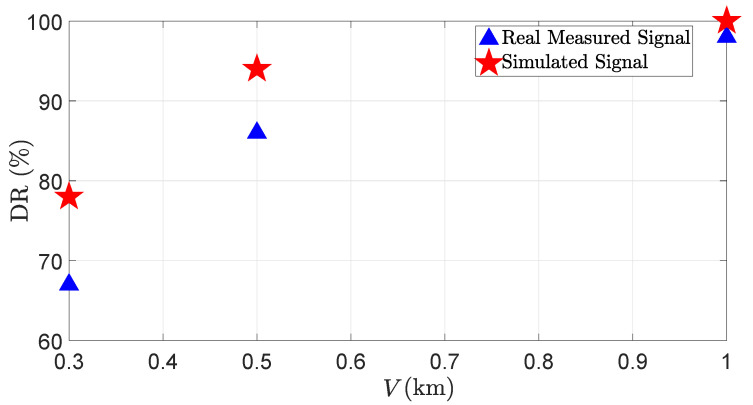
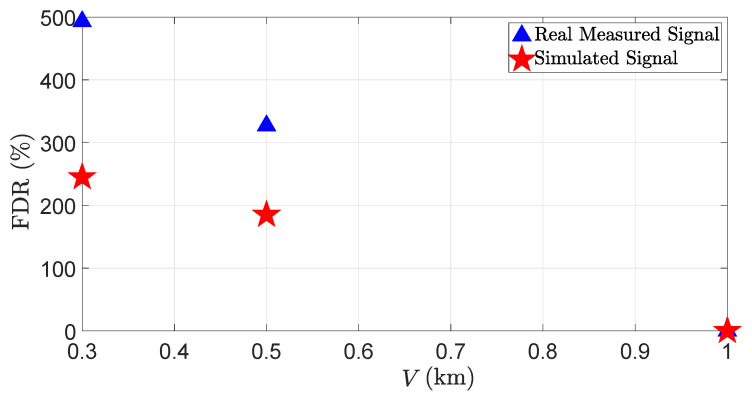
In this work, we introduce a novel approach to model the rain and fog effect on the light detection and ranging (LiDAR) sensor performance for the simulation-based testing of LiDAR systems. The proposed methodology allows for the simulation of the rain and fog effect using the rigorous applications of the Mie scattering theory on the time domain for transient and point cloud levels for spatial analyses. The time domain analysis permits us to benchmark the virtual LiDAR signal attenuation and signal-to-noise ratio (SNR) caused by rain and fog droplets. In addition, the detection rate (DR), false detection rate (FDR), and distance error derror of the virtual LiDAR sensor due to rain and fog droplets are evaluated on the point cloud level. The mean absolute percentage error (MAPE) is used to quantify the simulation and real measurement results on the time domain and point cloud levels for the rain and fog droplets. The results of the simulation and real measurements match well on the time domain and point cloud levels if the simulated and real rain distributions are the same. The real and virtual LiDAR sensor performance degrades more under the influence of fog droplets than in rain.
在这项工作中,我们引入了一种新颖的方法来模拟雨雾对光探测与测距(LiDAR)传感器性能的影响,用于基于模拟的LiDAR系统测试。所提出的方法允许通过在时域上对瞬态和点云级别严格应用米氏散射理论来模拟雨雾效果,以进行空间分析。时域分析使我们能够对由雨雾滴引起的虚拟LiDAR信号衰减和信噪比(SNR)进行基准测试。此外,在点云级别上评估了由于雨雾滴导致的虚拟LiDAR传感器的检测率(DR)、误检率(FDR)和距离误差derrror。平均绝对百分比误差(MAPE)用于量化雨雾滴在时域和点云级别上的模拟和实际测量结果。如果模拟和实际降雨分布相同,则模拟结果和实际测量结果在时域和点云级别上匹配良好。在雾滴的影响下,实际和虚拟LiDAR传感器的性能比在雨中下降得更多。