School of Mechanical Engineering, Yeungnam University, 280 Daehak-Ro, Gyeongsan 38541, Republic of Korea.
Sensors (Basel). 2023 Mar 16;23(6):3184. doi: 10.3390/s23063184.
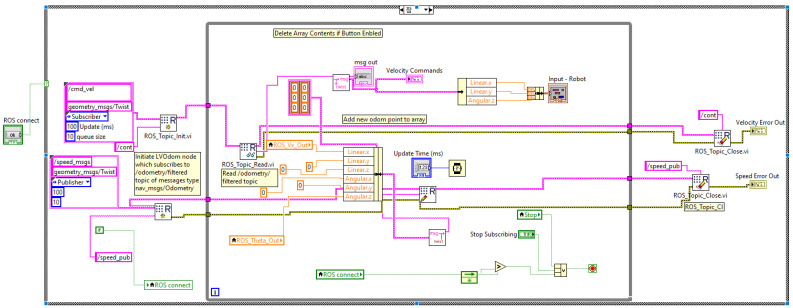
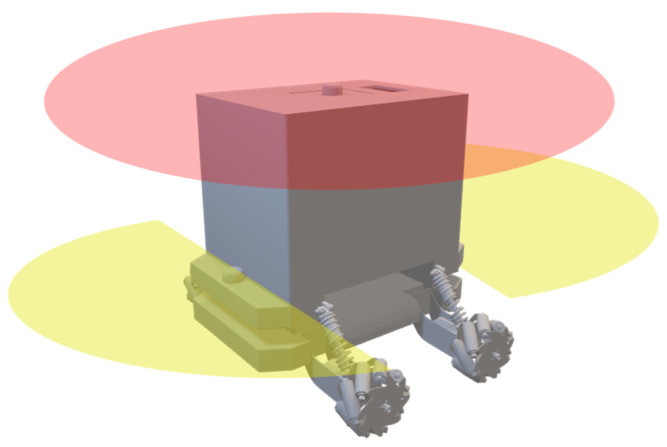
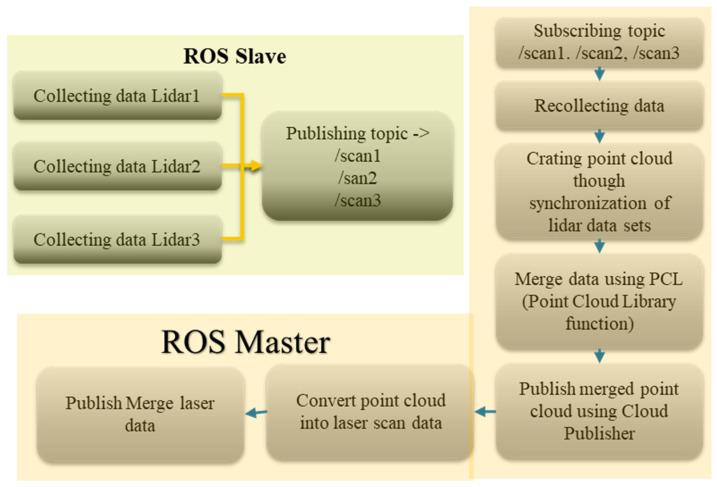
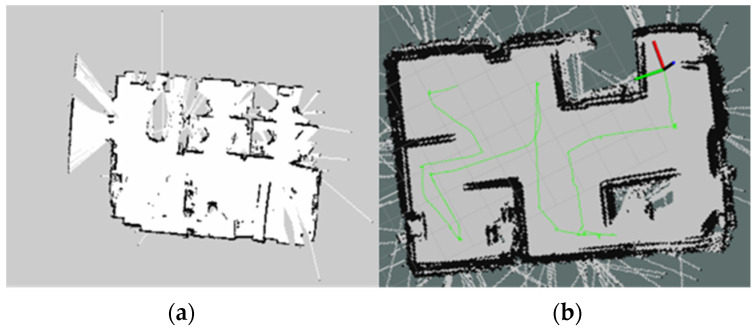
The integration of intelligent robots in industrial production processes has the potential to significantly enhance efficiency and reduce human adversity. However, for such robots to effectively operate within human environments, it is critical that they possess an adequate understanding of their surroundings and are able to navigate through narrow aisles while avoiding both stationary and moving obstacles. In this research study, an omnidirectional automotive mobile robot has been designed for the purpose of performing industrial logistics tasks within heavy traffic and dynamic environments. A control system has been developed, which incorporates both high-level and low-level algorithms, and a graphical interface has been introduced for each control system. A highly efficient micro-controller, namely myRIO, has been utilized as the low-level computer to control the motors with an appropriate level of accuracy and robustness. Additionally, a Raspberry Pi 4, in conjunction with a remote PC, has been utilized for high-level decision making, such as mapping the experimental environment, path planning, and localization, through the utilization of multiple Lidar sensors, IMU, and odometry data generated by wheel encoders. In terms of software programming, LabVIEW has been employed for the low-level computer, and the Robot Operating System (ROS) has been utilized for the design of the higher-level software architecture. The proposed techniques discussed in this paper provide a solution for the development of medium- and large-category omnidirectional mobile robots with autonomous navigation and mapping capabilities.
智能机器人在工业生产过程中的集成有可能显著提高效率并降低人力风险。然而,为了使这些机器人能够在人类环境中有效地运行,它们必须对周围环境有足够的了解,并能够在狭窄的通道中导航,同时避免静止和移动的障碍物。在这项研究中,设计了一种全方位汽车移动机器人,用于在繁忙和动态环境中执行工业物流任务。开发了一个控制系统,该系统包含高层和低层算法,并为每个控制系统引入了图形界面。使用了高效的微控制器 myRIO 作为底层计算机,以适当的精度和鲁棒性控制电机。此外,还使用 Raspberry Pi 4 与远程 PC 结合使用,通过使用多个激光雷达传感器、IMU 和车轮编码器生成的里程计数据,进行高级决策,例如实验环境映射、路径规划和定位。在软件编程方面,使用了 LabVIEW 进行底层计算机编程,并使用机器人操作系统 (ROS) 设计了更高层次的软件架构。本文讨论的技术为开发具有自主导航和映射能力的中大型全方位移动机器人提供了一种解决方案。