Reda Mohamed, Onsy Ahmed, Haikal Amira Y, Ghanbari Ali
School of Engineering, University of Central Lancashire, Preston PR1 2HE, UK.
Computers and Control Systems Engineering Department, Faculty of Engineering, Mansoura University, Mansoura 35516, Egypt.
Sensors (Basel). 2024 Jul 17;24(14):4650. doi: 10.3390/s24144650.
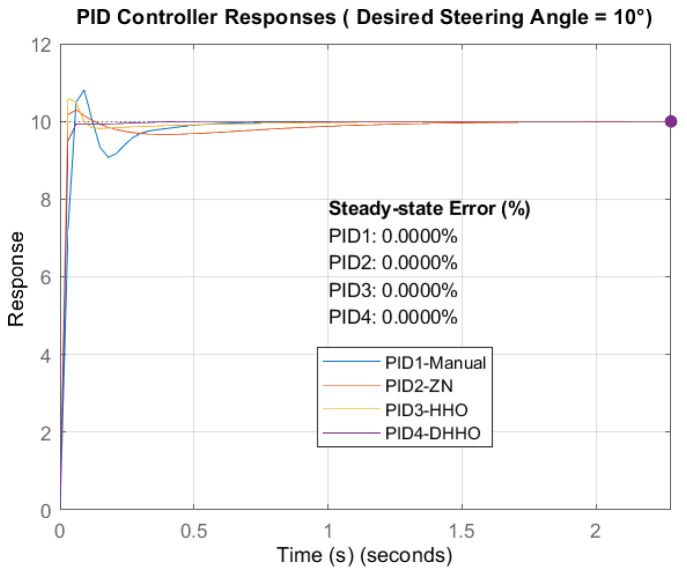
This paper aims to improve the steering performance of the Ackermann personal mobility scooter based on a new meta-heuristic optimization algorithm named Differential Harris Hawks Optimization (DHHO) and the modeling of the steering encoder. The steering response in the Ackermann mechanism is crucial for automated driving systems (ADS), especially in localization and path-planning phases. Various methods presented in the literature are used to control the steering, and meta-heuristic optimization algorithms have achieved prominent results. Harris Hawks optimization (HHO) algorithm is a recent algorithm that outperforms state-of-the-art algorithms in various optimization applications. However, it has yet to be applied to the steering control application. The research in this paper was conducted in three stages. First, practical experiments were performed on the steering encoder sensor that measures the steering angle of the Landlex mobility scooter, and supervised learning was applied to model the results obtained for the steering control. Second, the DHHO algorithm is proposed by introducing mutation between hawks in the exploration phase instead of the Hawks perch technique, improving population diversity and reducing premature convergence. The simulation results on CEC2021 benchmark functions showed that the DHHO algorithm outperforms the HHO, PSO, BAS, and CMAES algorithms. The mean error of the DHHO is improved with a confidence level of 99.8047% and 91.6016% in the 10-dimension and 20-dimension problems, respectively, compared with the original HHO. Third, DHHO is implemented for interactive real-time PID tuning to control the steering of the Ackermann scooter. The practical transient response results showed that the settling time is improved by 89.31% compared to the original response with no overshoot and steady-state error, proving the superior performance of the DHHO algorithm compared to the traditional control methods.
本文旨在基于一种名为差分哈里斯鹰优化(DHHO)的新元启发式优化算法以及转向编码器建模,来提高阿克曼个人移动踏板车的转向性能。阿克曼机构中的转向响应对于自动驾驶系统(ADS)至关重要,尤其是在定位和路径规划阶段。文献中提出的各种方法被用于控制转向,元启发式优化算法取得了显著成果。哈里斯鹰优化(HHO)算法是一种最近的算法,在各种优化应用中优于现有算法。然而,它尚未应用于转向控制应用。本文的研究分三个阶段进行。首先,对测量Landlex移动踏板车转向角的转向编码器传感器进行了实际实验,并应用监督学习对转向控制获得的结果进行建模。其次,通过在探索阶段引入鹰之间的变异而不是鹰栖息技术来提出DHHO算法,提高种群多样性并减少早熟收敛。在CEC2021基准函数上的仿真结果表明,DHHO算法优于HHO、PSO、BAS和CMAES算法。与原始HHO相比,在10维问题和20维问题中,DHHO的平均误差分别在99.8047%和91.6016%的置信水平下得到改善。第三,将DHHO用于交互式实时PID整定,以控制阿克曼踏板车的转向。实际瞬态响应结果表明,与无超调且无稳态误差的原始响应相比,调节时间提高了89.31%,证明了DHHO算法相对于传统控制方法的优越性能。