Scherer Moritz, Kausch Lisa, Bajwa Akbar, Neumann Jan-Oliver, Ishak Basem, Naser Paul, Vollmuth Philipp, Kiening Karl, Maier-Hein Klaus, Unterberg Andreas
Department of Neurosurgery, Heidelberg University Hospital, 69120 Heidelberg, Germany.
Division of Medical Image Computing, German Cancer Research Center (DKFZ) Heidelberg, 69120 Heidelberg, Germany.
J Clin Med. 2023 Apr 2;12(7):2646. doi: 10.3390/jcm12072646.
This ex vivo experimental study sought to compare screw planning accuracy of a self-derived deep-learning-based (DL) and a commercial atlas-based (ATL) tool and to assess robustness towards pathologic spinal anatomy.
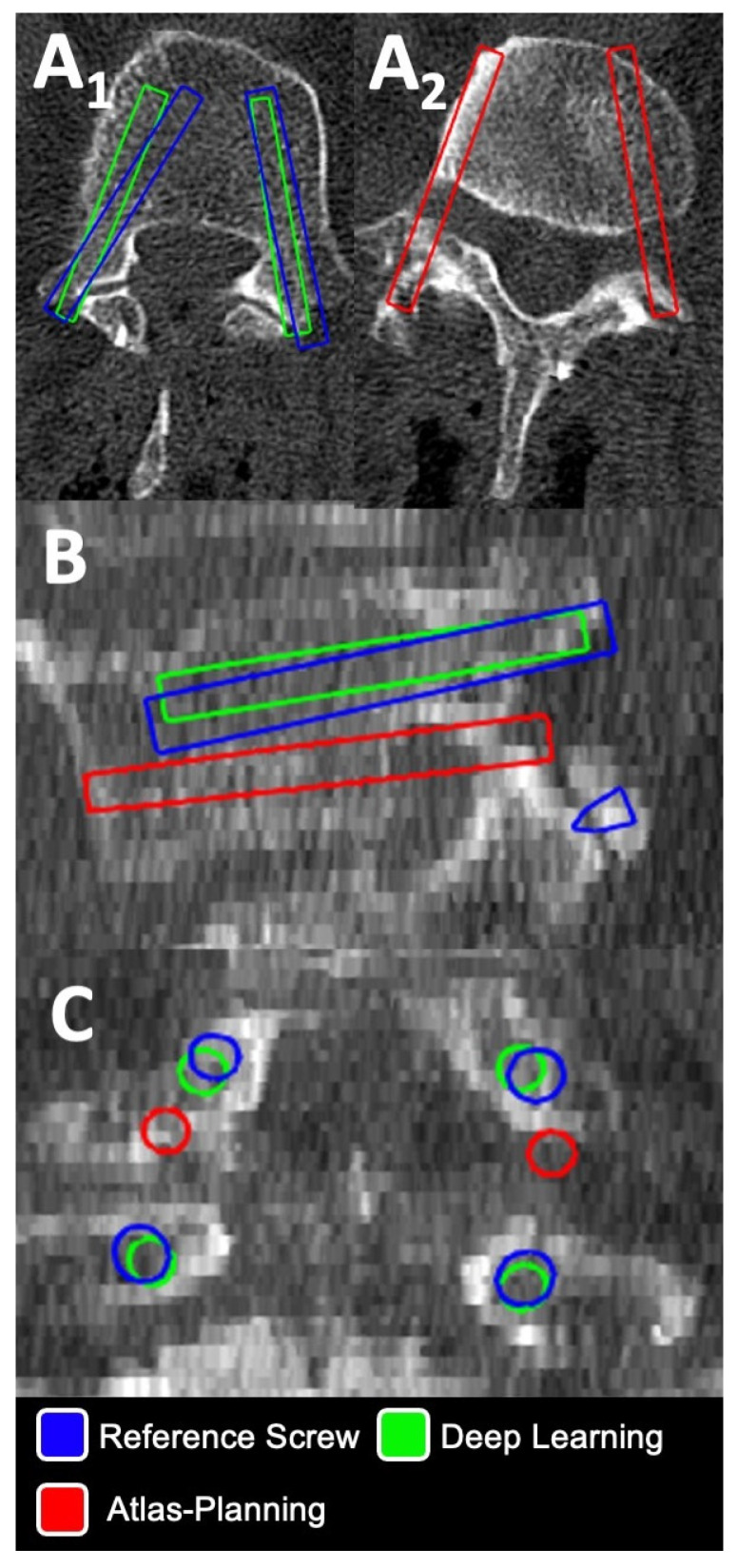
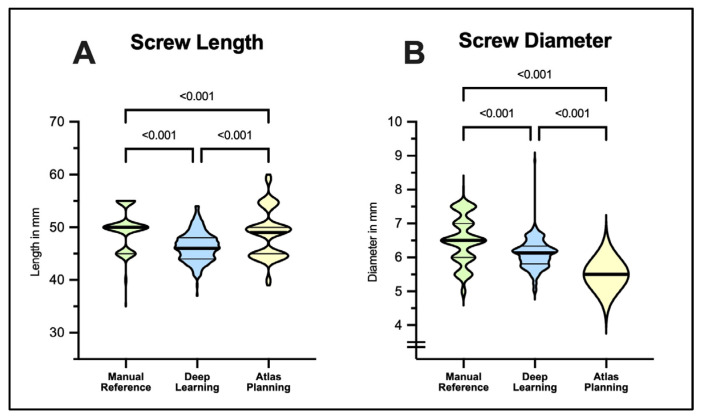
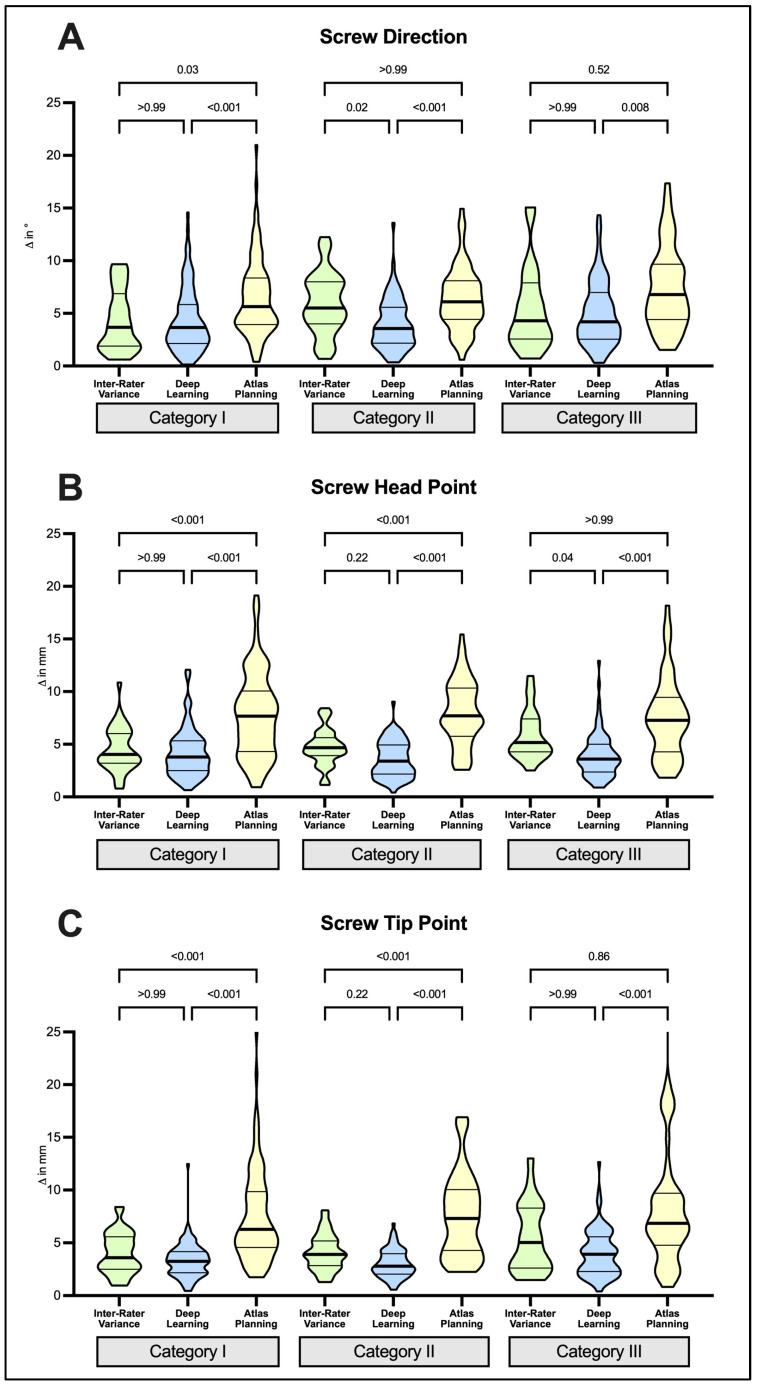
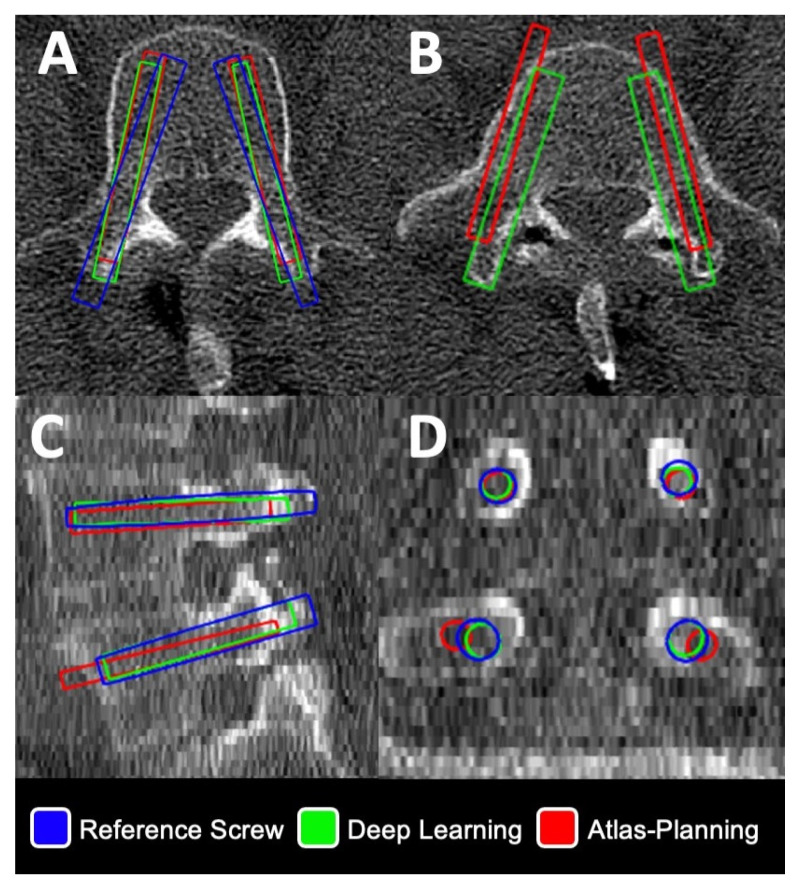
From a consecutive registry, 50 cases (256 screws in L1-L5) were randomly selected for experimental planning. Reference screws were manually planned by two independent raters. Additional planning sets were created using the automatic DL and ATL tools. Using Python, automatic planning was compared to the reference in 3D space by calculating minimal absolute distances (MAD) for screw head and tip points (mm) and angular deviation (degree). Results were evaluated for interrater variability of reference screws. Robustness was evaluated in subgroups stratified for alteration of spinal anatomy.
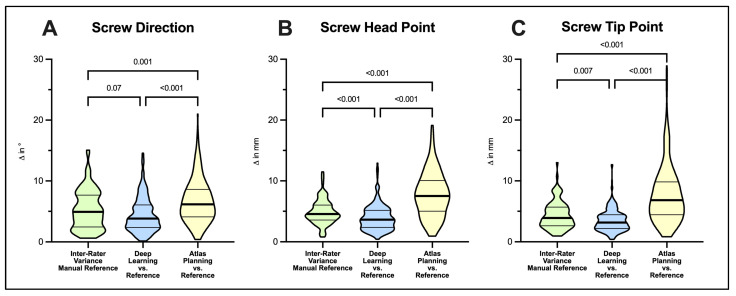
Planning was successful in all 256 screws using DL and in 208/256 (81%) using ATL. MAD to the reference for head and tip points and angular deviation was 3.93 ± 2.08 mm, 3.49 ± 1.80 mm and 4.46 ± 2.86° for DL and 7.77 ± 3.65 mm, 7.81 ± 4.75 mm and 6.70 ± 3.53° for ATL, respectively. Corresponding interrater variance for reference screws was 4.89 ± 2.04 mm, 4.36 ± 2.25 mm and 5.27 ± 3.20°, respectively. Planning accuracy was comparable to the manual reference for DL, while ATL produced significantly inferior results ( < 0.0001). DL was robust to altered spinal anatomy while planning failure was pronounced for ATL in 28/82 screws (34%) in the subgroup with severely altered spinal anatomy and alignment ( < 0.0001).
Deep learning appears to be a promising approach to reliable automated screw planning, coping well with anatomic variations of the spine that severely limit the accuracy of ATL systems.
本体外实验研究旨在比较一种自主研发的基于深度学习(DL)的工具和一种基于商用图谱(ATL)的工具在螺钉规划方面的准确性,并评估其对病理性脊柱解剖结构的稳健性。
从连续登记中随机选择50例病例(L1 - L5节段共256枚螺钉)进行实验规划。由两名独立评估者手动规划参考螺钉。使用自动DL和ATL工具创建额外的规划集。利用Python,通过计算螺钉头部和尖端点的最小绝对距离(MAD,单位为mm)和角度偏差(单位为度),在三维空间中将自动规划与参考进行比较。对参考螺钉的评估者间变异性进行结果评估。在根据脊柱解剖结构改变分层的亚组中评估稳健性。
使用DL时,所有256枚螺钉的规划均成功;使用ATL时,256枚中有208枚(81%)成功。DL相对于参考的头部和尖端点的MAD以及角度偏差分别为3.93±2.08mm、3.49±1.80mm和4.46±2.86°,ATL分别为7.77±3.65mm、7.81±4.75mm和6.70±3.53°。参考螺钉相应的评估者间方差分别为4.89±2.04mm、4.36±2.25mm和5.27±3.20°。DL的规划准确性与手动参考相当,而ATL的结果明显较差(<0.0001)。DL对改变的脊柱解剖结构具有稳健性,而在脊柱解剖结构和对线严重改变的亚组中,ATL在28/82枚螺钉(34%)中出现明显的规划失败(<0.0001)。
深度学习似乎是一种有前景的可靠自动螺钉规划方法,能很好地应对严重限制ATL系统准确性的脊柱解剖变异。