Research Center "E. Piaggio", Department of Information Engineering, University of Pisa, Largo Lucio Lazzarino 1, 56126 Pisa, Italy.
Department of Control and Computer Engineering, Politecnico di Torino, 10129 Torino, Italy.
Sensors (Basel). 2023 Apr 3;23(7):3716. doi: 10.3390/s23073716.
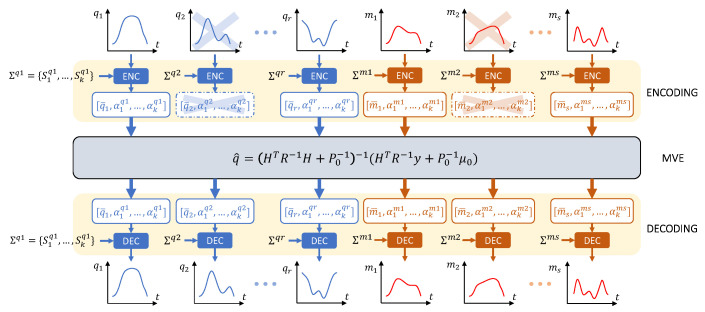
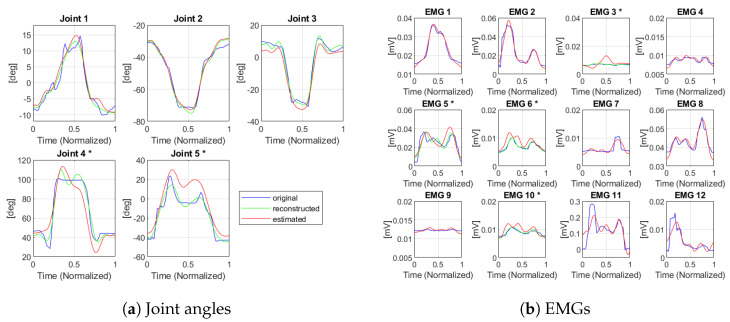
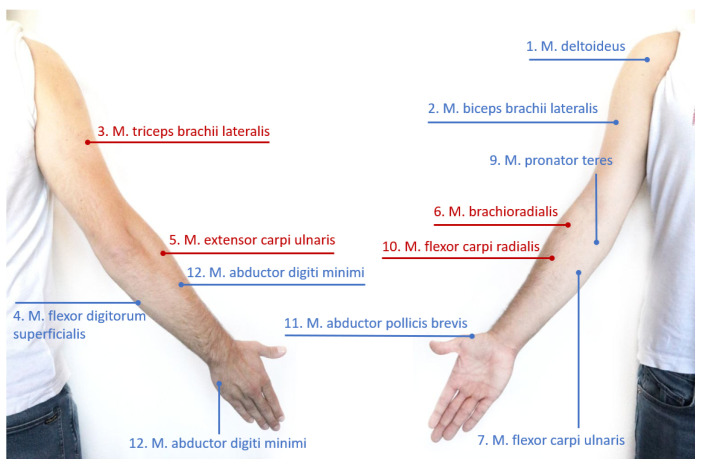
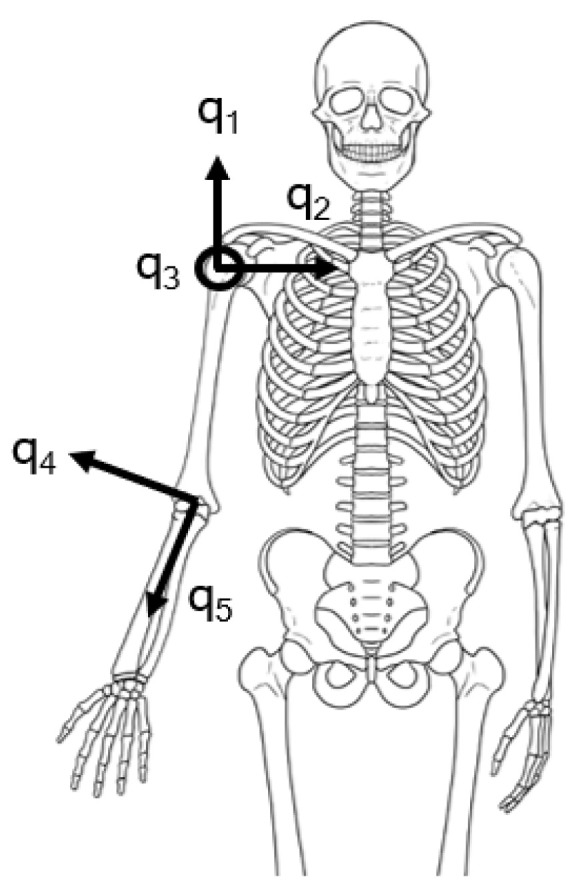
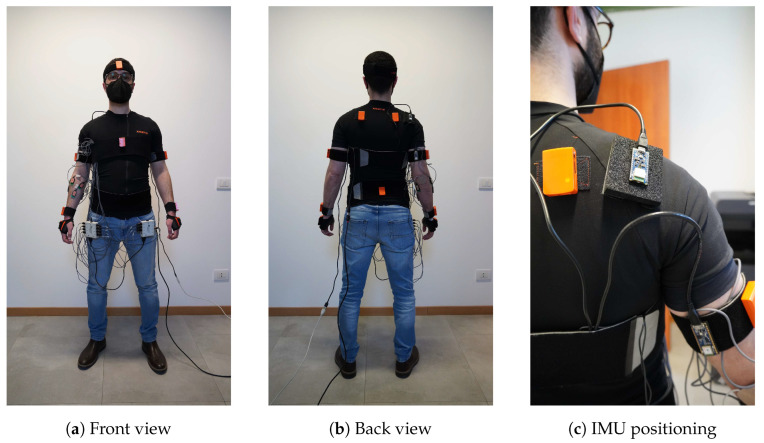
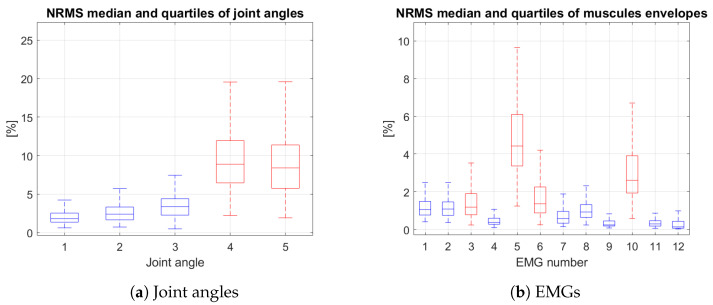
Wearable sensing solutions have emerged as a promising paradigm for monitoring human musculoskeletal state in an unobtrusive way. To increase the deployability of these systems, considerations related to cost reduction and enhanced form factor and wearability tend to discourage the number of sensors in use. In our previous work, we provided a theoretical solution to the problem of jointly reconstructing the entire muscular-kinematic state of the upper limb, when only a limited amount of optimally retrieved sensory data are available. However, the effective implementation of these methods in a physical, under-sensorized wearable has never been attempted before. In this work, we propose to bridge this gap by presenting an under-sensorized system based on inertial measurement units (IMUs) and surface electromyography (sEMG) electrodes for the reconstruction of the upper limb musculoskeletal state, focusing on the minimization of the sensors' number. We found that, relying on two IMUs only and eight sEMG sensors, we can conjointly reconstruct all 17 degrees of freedom (five joints, twelve muscles) of the upper limb musculoskeletal state, yielding a median normalized RMS error of 8.5% on the non-measured joints and 2.5% on the non-measured muscles.
可穿戴感测解决方案已经成为一种很有前途的范例,可以实现对人体肌肉骨骼状态的非侵入式监测。为了提高这些系统的可部署性,成本降低和增强的形式因素以及可穿戴性等因素往往会减少使用的传感器数量。在我们之前的工作中,我们提供了一种理论解决方案,用于联合重建上肢的整个肌肉运动状态,而仅使用有限数量的最佳检索到的感测数据。然而,这些方法在物理上的、传感器不足的可穿戴设备中的有效实现以前从未尝试过。在这项工作中,我们提出通过提出一个基于惯性测量单元(IMU)和表面肌电图(sEMG)电极的欠传感器系统来弥合这一差距,该系统用于重建上肢肌肉骨骼状态,重点是减少传感器的数量。我们发现,仅依靠两个 IMU 和八个 sEMG 传感器,我们就可以共同重建上肢肌肉骨骼状态的所有 17 个自由度(五个关节,十二个肌肉),非测量关节的中位数归一化均方根误差为 8.5%,非测量肌肉的中位数归一化均方根误差为 2.5%。