Department of Medical Equipment Technology, College of Applied Medical Science, Majmaah University, Al-Majmaah 11952, Saudi Arabia.
Department of Physics, College of Arts, Fezzan University, Traghen 71340, Libya.
Sensors (Basel). 2023 Apr 17;23(8):4033. doi: 10.3390/s23084033.
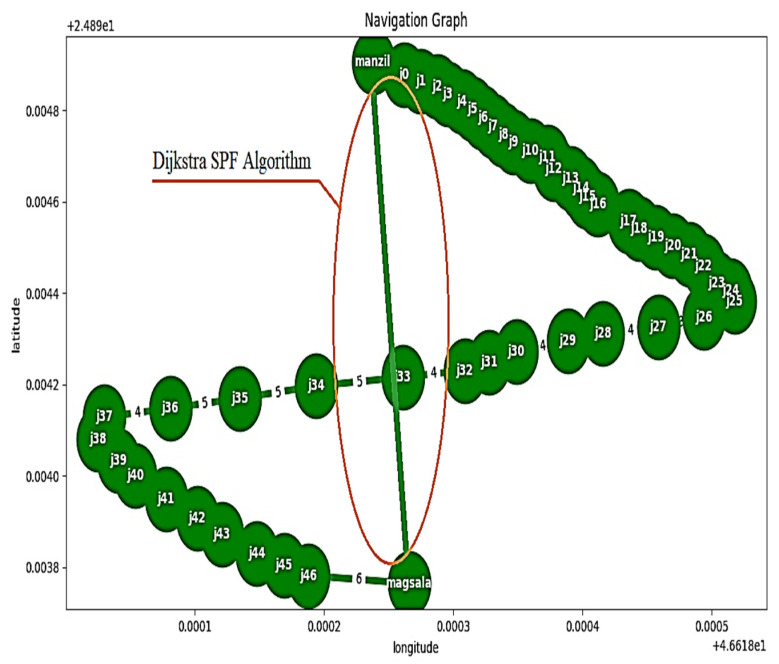
In this work, we developed a prototype that adopted sound-based systems for localization of visually impaired individuals. The system was implemented based on a wireless ultrasound network, which helped the blind and visually impaired to navigate and maneuver autonomously. Ultrasonic-based systems use high-frequency sound waves to detect obstacles in the environment and provide location information to the user. Voice recognition and long short-term memory (LSTM) techniques were used to design the algorithms. The Dijkstra algorithm was also used to determine the shortest distance between two places. Assistive hardware tools, which included an ultrasonic sensor network, a global positioning system (GPS), and a digital compass, were utilized to implement this method. For indoor evaluation, three nodes were localized on the doors of different rooms inside the house, including the kitchen, bathroom, and bedroom. The coordinates (interactive latitude and longitude points) of four outdoor areas (mosque, laundry, supermarket, and home) were identified and stored in a microcomputer's memory to evaluate the outdoor settings. The results showed that the root mean square error for indoor settings after 45 trials is about 0.192. In addition, the Dijkstra algorithm determined that the shortest distance between two places was within an accuracy of 97%.
在这项工作中,我们开发了一个原型,采用基于声音的系统来定位视障人士。该系统是基于无线超声网络实现的,这有助于盲人或视力受损人士自主导航和操纵。基于超声的系统使用高频声波来检测环境中的障碍物,并向用户提供位置信息。我们使用语音识别和长短期记忆 (LSTM) 技术来设计算法。还使用了迪杰斯特拉算法来确定两点之间的最短距离。辅助硬件工具,包括超声传感器网络、全球定位系统 (GPS) 和数字指南针,用于实现这种方法。在室内评估中,三个节点被定位在房屋内不同房间的门上,包括厨房、浴室和卧室。四个室外区域(清真寺、洗衣房、超市和家)的坐标(交互纬度和经度点)被识别并存储在微机的内存中,以评估室外环境。结果表明,45 次试验后室内环境的均方根误差约为 0.192。此外,迪杰斯特拉算法确定的两点之间的最短距离精度在 97%以内。