BE-CEM Beams Department, Controls, Electronics and Mechatronics Group, European Organization for Nuclear Research (CERN), 1217 Geneva, Switzerland.
Interactive Robotic Systems Lab, Jaume I University of Castellón, 12006 Castellón de la Plana, Spain.
Sensors (Basel). 2023 Jun 5;23(11):5344. doi: 10.3390/s23115344.
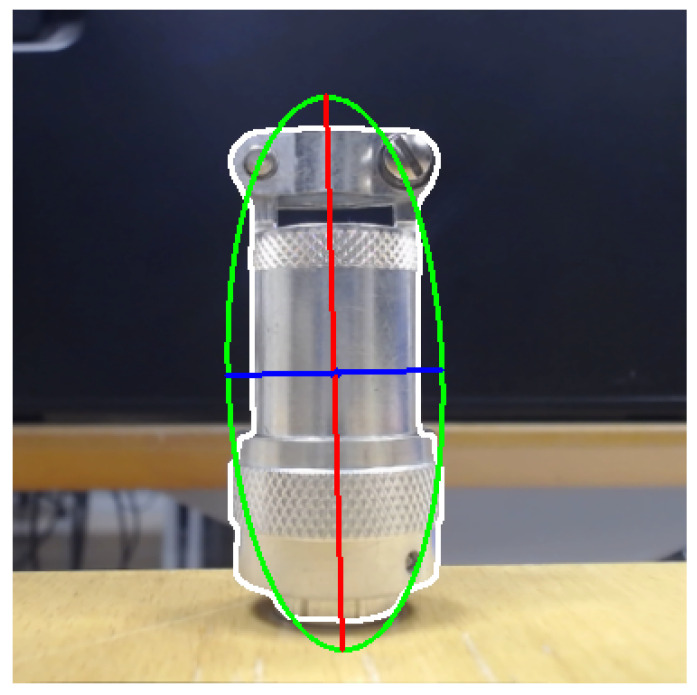
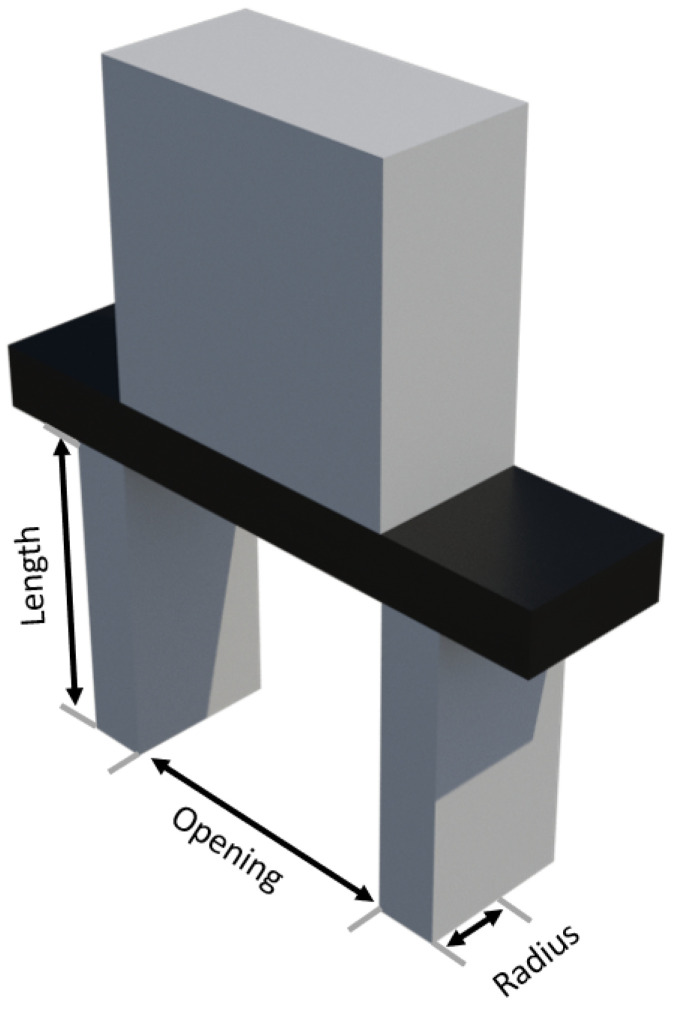
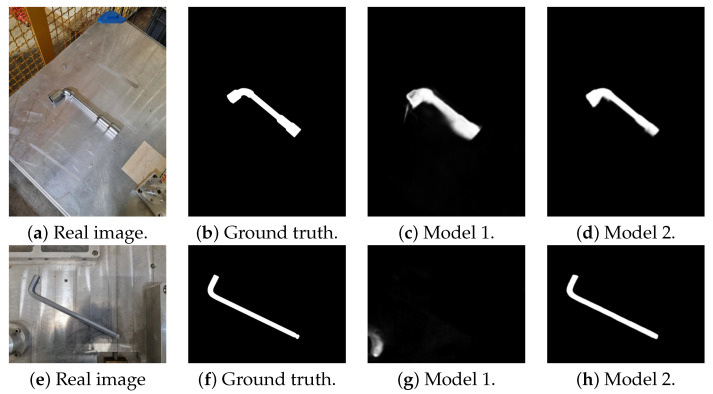
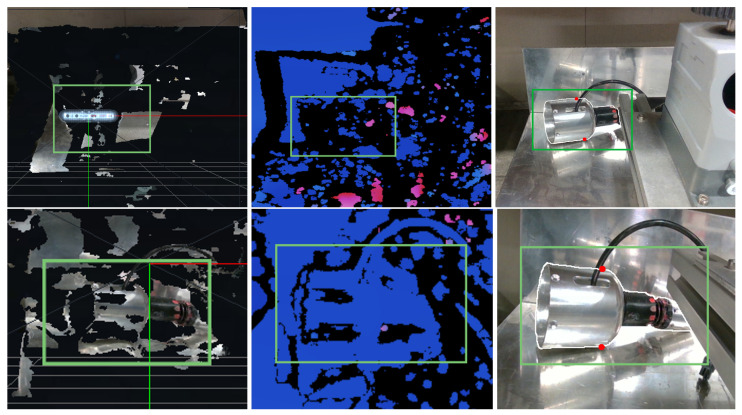
Robotic handling of objects is not always a trivial assignment, even in teleoperation where, in most cases, this might lead to stressful labor for operators. To reduce the task difficulty, supervised motions could be performed in safe scenarios to reduce the workload in these non-critical steps by using machine learning and computer vision techniques. This paper describes a novel grasping strategy based on a groundbreaking geometrical analysis which extracts diametrically opposite points taking into account surface smoothing (even those target objects that might conform highly complex shapes) to guarantee the uniformity of the grasping. It uses a monocular camera, as we are often facing space restrictions that generate the need to use laparoscopic cameras integrated in the tools, to recognize and isolate targets from the background, estimating their spatial coordinates and providing the best possible stable grasping points for both feature and featureless objects. It copes with reflections and shadows produced by light sources (which require extra effort to extract their geometrical properties) in unstructured facilities such as nuclear power plants or particle accelerators on scientific equipment. Based on the experimental results, utilizing a specialized dataset improved the detection of metallic objects in low-contrast environments, resulting in the successful application of the algorithm with error rates in the scale of millimeters in the majority of repeatability and accuracy tests.
机器人处理物体并不总是一件简单的任务,即使在遥操作中,这种操作也可能会给操作人员带来很大的压力。为了降低任务难度,可以在安全的场景中执行监督运动,通过使用机器学习和计算机视觉技术,减少这些非关键步骤的工作量。本文描述了一种新颖的抓取策略,该策略基于开创性的几何分析,考虑到表面平滑度(即使是那些可能具有高度复杂形状的目标物体),提取直径相对的点,以保证抓取的均匀性。它使用单目摄像机,因为我们经常面临空间限制,需要使用集成在工具中的腹腔镜摄像机,从背景中识别和隔离目标,并估计其空间坐标,为有特征和无特征的物体提供尽可能稳定的抓取点。它可以应对光源产生的反射和阴影(需要额外的努力来提取它们的几何特性),在核电厂或粒子加速器等非结构化设施中的科学设备上。基于实验结果,利用专门的数据集提高了在低对比度环境下对金属物体的检测能力,使得该算法在大多数重复性和准确性测试中都能成功应用,误差率在毫米级。