Bio-MAX Institute, Seoul National University, Seoul, South Korea.
Basic Science and Engineering Initiative, Children's Heart Center, Stanford University, Stanford, CA, USA.
Nat Commun. 2023 Jun 16;14(1):3597. doi: 10.1038/s41467-023-39186-x.
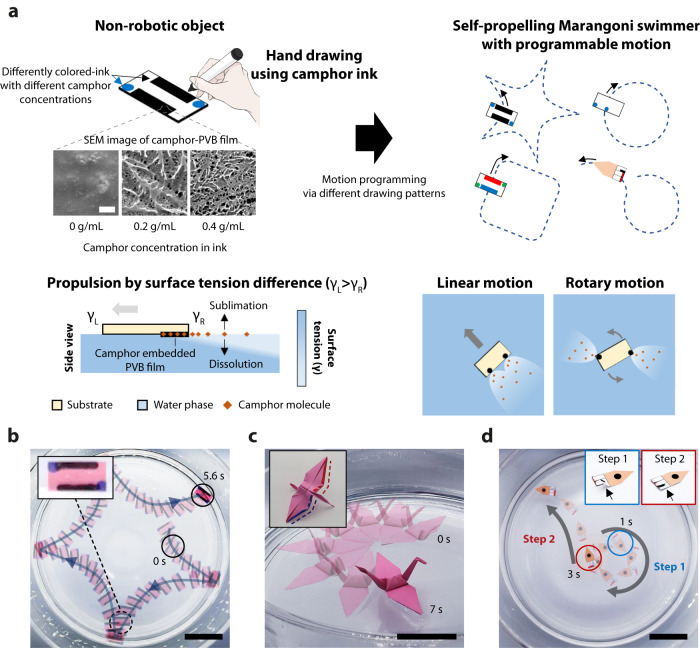
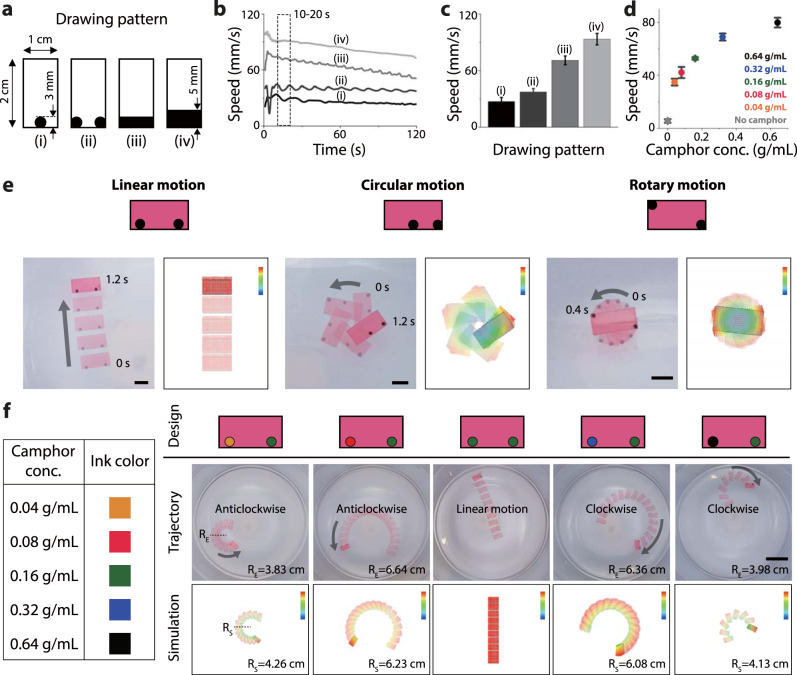
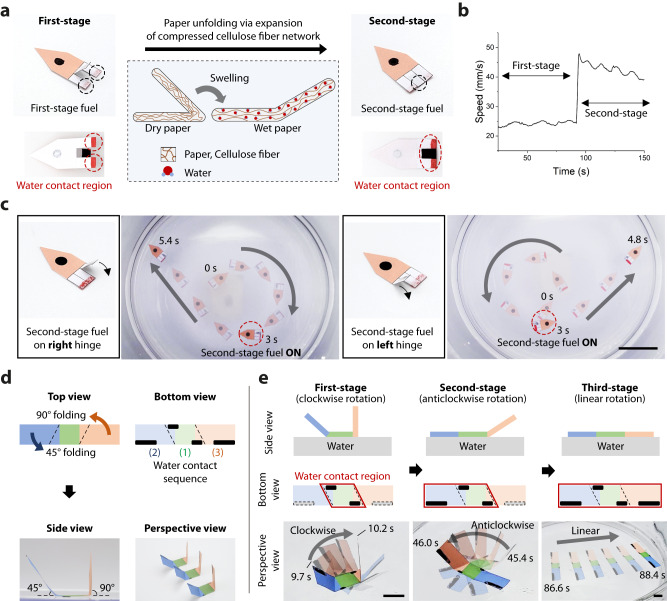
Pen-drawing is an intuitive, convenient, and creative fabrication method for delivering emergent and adaptive design to real devices. To demonstrate the application of pen-drawing to robot construction, we developed pen-drawn Marangoni swimmers that perform complex programmed tasks using a simple and accessible manufacturing process. By simply drawing on substrates using ink-based Marangoni fuel, the swimmers demonstrate advanced robotic motions such as polygon and star-shaped trajectories, and navigate through maze. The versatility of pen-drawing allows the integration of the swimmers with time-varying substrates, enabling multi-step motion tasks such as cargo delivery and return to the original place. We believe that our pen-based approach will significantly expand the potential applications of miniaturized swimming robots and provide new opportunities for simple robotic implementations.
徒手绘图是一种直观、便捷且富有创意的制造方法,可将紧急自适应设计转化为实际设备。为了展示徒手绘图在机器人制造中的应用,我们开发了基于徒手绘图的 Marangoni 游泳者,它们使用简单且易于获取的制造工艺执行复杂的编程任务。游泳者仅需使用基于墨水的 Marangoni 燃料在基底上进行绘图,即可展示先进的机器人运动,例如多边形和星形轨迹,并在迷宫中导航。徒手绘图的多功能性允许游泳者与随时间变化的基底集成,从而能够实现诸如货物运送和返回原地等多步骤运动任务。我们相信,我们的基于笔的方法将极大地扩展微型游泳机器人的潜在应用,并为简单的机器人实现提供新的机会。