Department of Energy Systems Engineering, Seoul National University, Seoul 08826, Republic of Korea.
Department of Energy and Mineral Resources Engineering, Dong-A University, Busan 49315, Republic of Korea.
Sensors (Basel). 2023 Jun 24;23(13):5858. doi: 10.3390/s23135858.
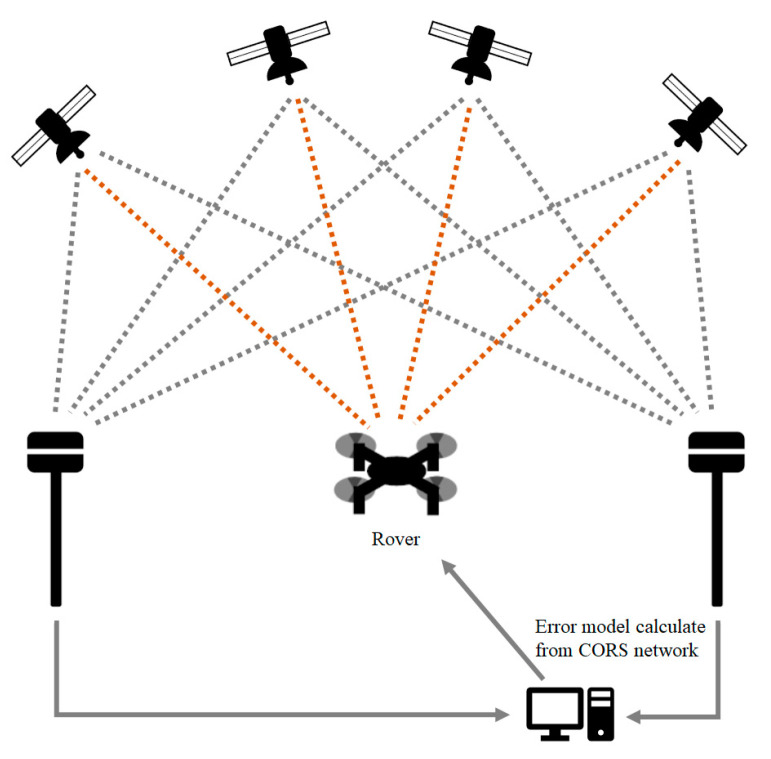
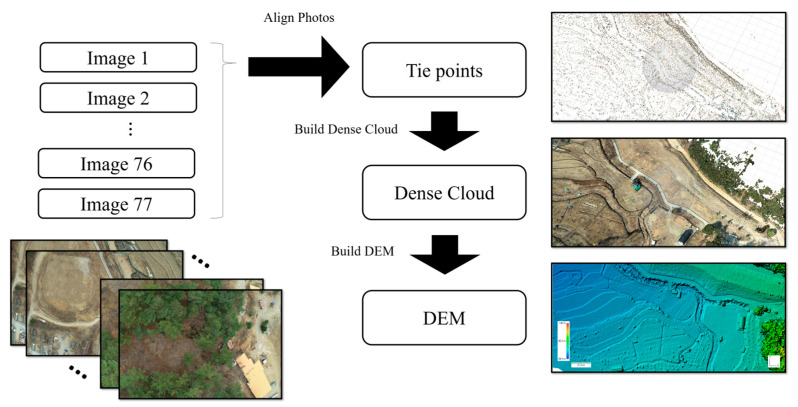
Global navigation satellite systems (GNSSs) provide a common positioning method that utilizes satellite signals to determine the spatial location of a receiver. However, there are several error factors in standalone GNSS positioning due to instrumental, procedural, and environmental factors that arise during the signal transmission process, and the final positioning error can be up to several meters or greater in length. Thus, real-time kinematic (RTK) correction and post-mission precise point positioning (PPP) processing technologies are proposed to improve accuracy and accomplish precise position measurements. To evaluate the geolocation accuracy of mosaicked UAV images of an abandoned mine site, we compared each orthomosaic image and digital elevation model obtained using standalone GNSS positioning, differential (RTK) GNSS positioning, and post-mission PPP processing techniques. In the three types of error evaluation measure (i.e., relative camera location error, ground control points-based absolute image mapping error, and volumetric difference of mine tailings), we found that the RTK GNSS positioning method obtained the best performance in terms of the relative camera location error and the absolute image mapping error evaluations, and the PPP post-processing correction effectively reduced the error (69.5% of the average total relative camera location error and 59.3% of the average total absolute image mapping error) relative to the standalone GNSS positioning method. Although differential (RTK) GNSS positioning is widely used in positioning applications that require very high accuracy, post-mission PPP processing can also be used in various fields in which it is either not feasible to operate expensive equipment to receive RTK GNSS signals or network RTK services are unavailable.
全球导航卫星系统(GNSS)提供了一种通用的定位方法,利用卫星信号来确定接收器的空间位置。然而,由于仪器、程序和环境因素在信号传输过程中产生的误差因素,独立 GNSS 定位存在几个误差,最终的定位误差可能长达几米或更大。因此,提出了实时动态(RTK)校正和事后精密单点定位(PPP)处理技术,以提高精度并实现精确的位置测量。为了评估废弃矿山无人机镶嵌图像的地理定位精度,我们比较了使用独立 GNSS 定位、差分(RTK)GNSS 定位和事后 PPP 处理技术获得的每个正射镶嵌图像和数字高程模型。在三种误差评估方法(即相对相机位置误差、基于地面控制点的绝对图像映射误差和尾矿体积差异)中,我们发现 RTK GNSS 定位方法在相对相机位置误差和绝对图像映射误差评估方面表现最好,PPP 后处理校正有效地降低了误差(平均总相对相机位置误差的 69.5%和平均总绝对图像映射误差的 59.3%)与独立 GNSS 定位方法相比。尽管差分(RTK)GNSS 定位在需要非常高精度的定位应用中得到了广泛应用,但事后 PPP 处理也可用于各种领域,在这些领域中,操作昂贵的设备接收 RTK GNSS 信号或无法使用网络 RTK 服务是不可行的。