Institute of Mechanical Intelligence, Scuola Superiore Sant'Anna, 56127 Pisa, Italy.
Department of Computer and Information Sciences, Northumbria University, Newcastle upon Tyne NE1 8ST, UK.
Sensors (Basel). 2023 Jun 25;23(13):5885. doi: 10.3390/s23135885.
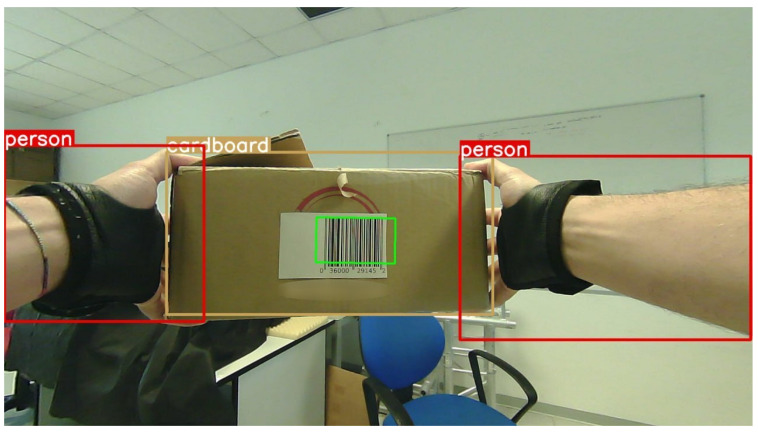
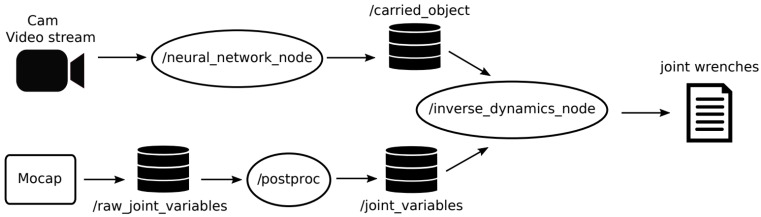
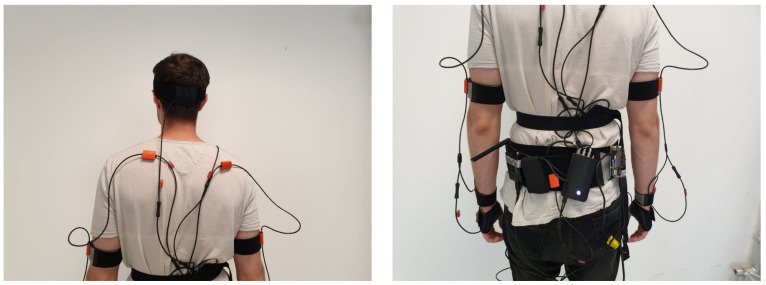
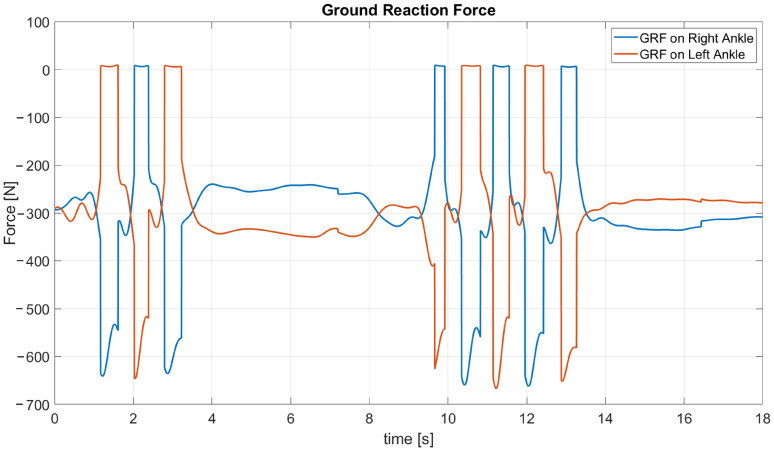
Despite the automatization of many industrial and logistics processes, human workers are still often involved in the manual handling of loads. These activities lead to many work-related disorders that reduce the quality of life and the productivity of aged workers. A biomechanical analysis of such activities is the basis for a detailed estimation of the biomechanical overload, thus enabling focused prevention actions. Thanks to wearable sensor networks, it is now possible to analyze human biomechanics by an inverse dynamics approach in ecological conditions. The purposes of this study are the conceptualization, formulation, and implementation of a deep learning-assisted fully wearable sensor system for an online evaluation of the biomechanical effort that an operator exerts during a manual material handling task. In this paper, we show a novel, computationally efficient algorithm, implemented in ROS, to analyze the biomechanics of the human musculoskeletal systems by an inverse dynamics approach. We also propose a method for estimating the load and its distribution, relying on an egocentric camera and deep learning-based object recognition. This method is suitable for objects of known weight, as is often the case in logistics. Kinematic data, along with foot contact information, are provided by a fully wearable sensor network composed of inertial measurement units. The results show good accuracy and robustness of the system for object detection and grasp recognition, thus providing reliable load estimation for a high-impact field such as logistics. The outcome of the biomechanical analysis is consistent with the literature. However, improvements in gait segmentation are necessary to reduce discontinuities in the estimated lower limb articular wrenches.
尽管许多工业和物流流程已经实现自动化,但人类工人仍经常参与负载的手动搬运。这些活动导致许多与工作相关的疾病,降低了老年工人的生活质量和生产力。对这些活动进行生物力学分析是对生物力学过载进行详细估计的基础,从而能够采取有针对性的预防措施。由于可穿戴传感器网络的出现,现在可以在生态条件下通过逆动力学方法分析人类生物力学。本研究的目的是概念化、制定和实现一个深度学习辅助的全可穿戴传感器系统,以便在线评估操作员在手动搬运任务中施加的生物力学用力。在本文中,我们展示了一种新颖的、计算效率高的算法,该算法在 ROS 中实现,通过逆动力学方法分析人体肌肉骨骼系统的生物力学。我们还提出了一种依赖于以自我为中心的摄像机和基于深度学习的物体识别来估计负载及其分布的方法。该方法适用于物流等常见情况下已知重量的物体。运动学数据以及脚部接触信息由由惯性测量单元组成的全可穿戴传感器网络提供。结果表明,该系统在物体检测和抓握识别方面具有良好的准确性和鲁棒性,从而为物流等高影响领域提供了可靠的负载估计。生物力学分析的结果与文献一致。然而,需要改进步态分割以减少估计下肢关节力时的不连续性。