Aractingi Michel, Léziart Pierre-Alexandre, Flayols Thomas, Perez Julien, Silander Tomi, Souères Philippe
LAAS-CNRS, Université de Toulouse, 31400, Toulouse, France.
NAVER LABS Europe, 38240, Meylan, France.
Sci Rep. 2023 Jul 24;13(1):11945. doi: 10.1038/s41598-023-38259-7.
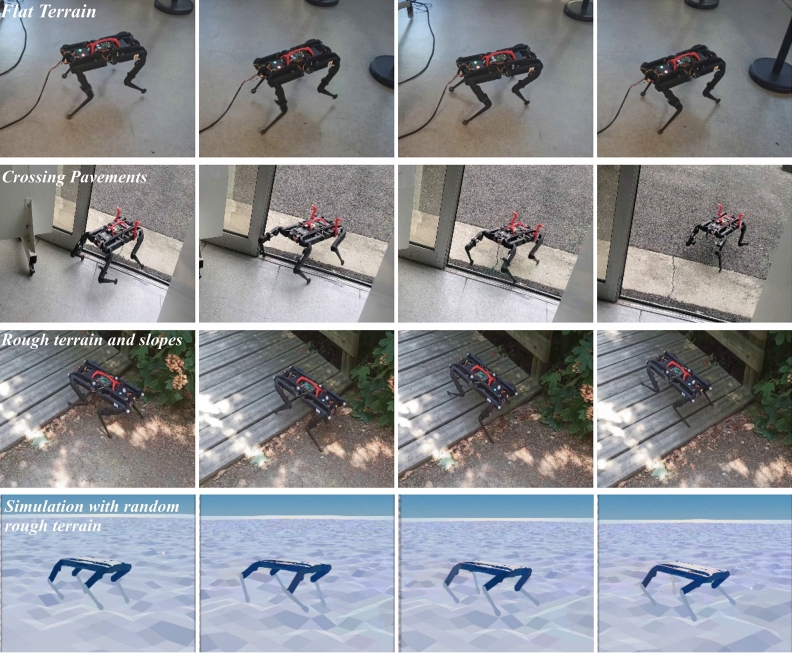
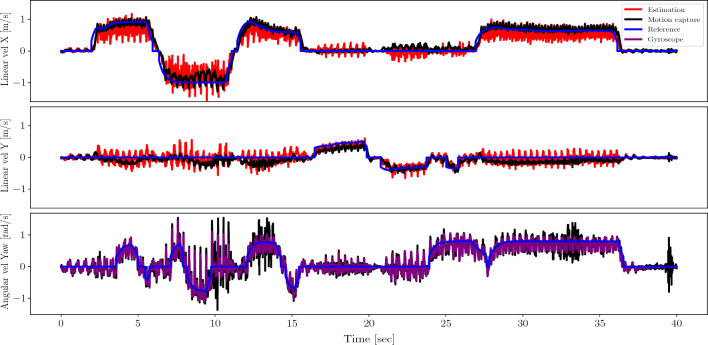
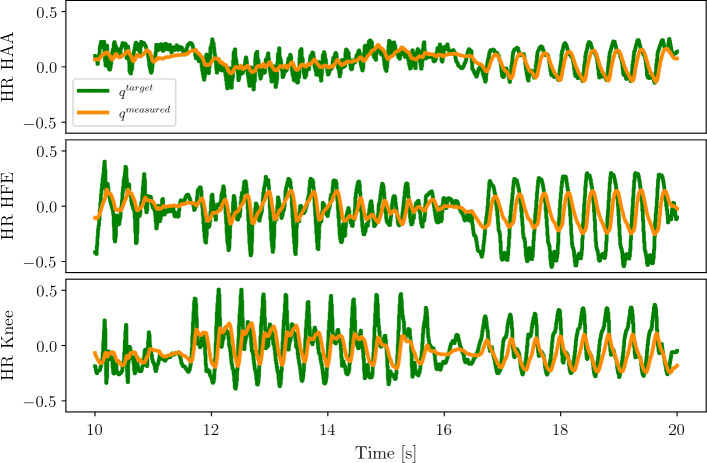
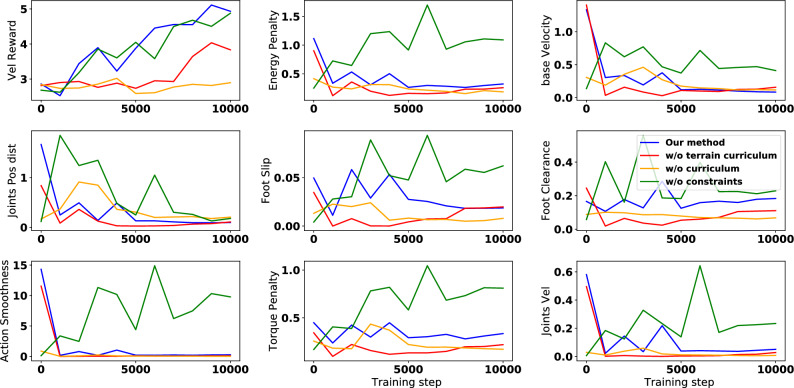
Quadruped robots require robust and general locomotion skills to exploit their mobility potential in complex and challenging environments. In this work, we present an implementation of a robust end-to-end learning-based controller on the Solo12 quadruped. Our method is based on deep reinforcement learning of joint impedance references. The resulting control policies follow a commanded velocity reference while being efficient in its energy consumption and easy to deploy. We detail the learning procedure and method for transfer on the real robot. We show elaborate experiments. Finally, we present experimental results of the learned locomotion on various grounds indoors and outdoors. These results show that the Solo12 robot is a suitable open-source platform for research combining learning and control because of the easiness in transferring and deploying learned controllers.
四足机器人需要强大且通用的运动技能,以便在复杂且具有挑战性的环境中充分发挥其移动潜力。在这项工作中,我们展示了在Solo12四足机器人上基于端到端学习的稳健控制器的实现。我们的方法基于关节阻抗参考的深度强化学习。由此产生的控制策略遵循指令速度参考,同时能耗高效且易于部署。我们详细介绍了在真实机器人上的学习过程和迁移方法。我们展示了详尽的实验。最后,我们展示了在室内和室外各种地面上学习到的运动的实验结果。这些结果表明,由于在迁移和部署学习到的控制器方面很容易,Solo12机器人是一个适合结合学习与控制进行研究的开源平台。