Sun Haoran, Yang Linhan, Gu Yuping, Pan Jia, Wan Fang, Song Chaoyang
Department of Mechanical and Energy Engineering, Southern University of Science and Technology, Shenzhen 518055, China.
Department of Computer Science, The University of Hong Kong, Hong Kong SAR, China.
Biomimetics (Basel). 2023 Aug 14;8(4):364. doi: 10.3390/biomimetics8040364.
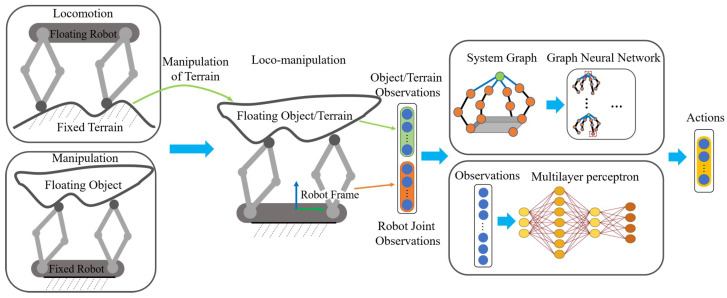
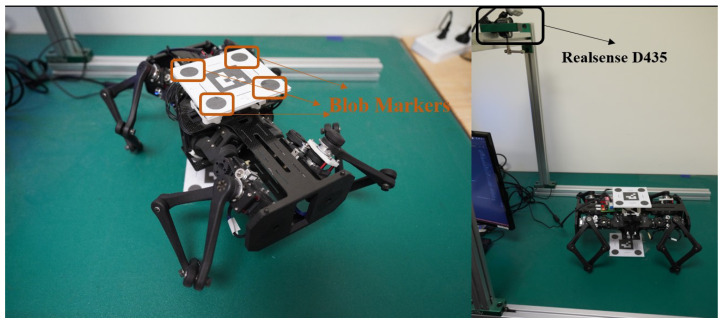
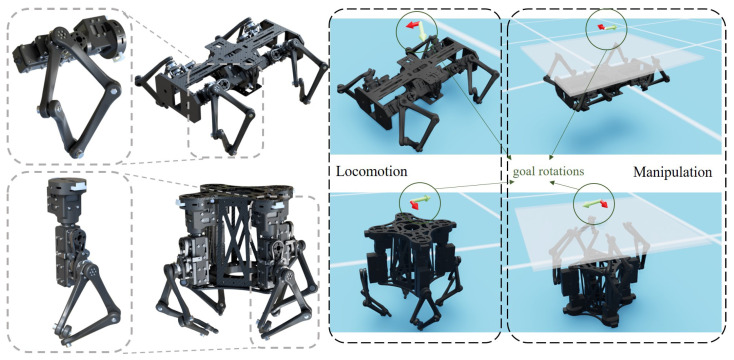
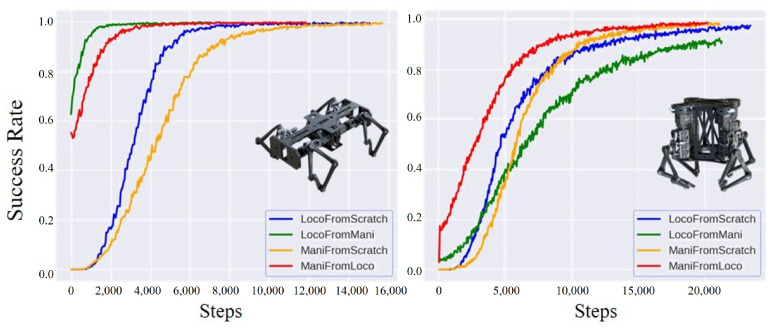
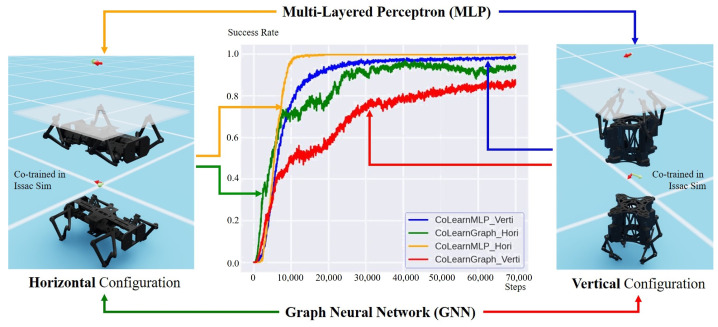
Locomotion and manipulation are two essential skills in robotics but are often divided or decoupled into two separate problems. It is widely accepted that the topological duality between multi-legged locomotion and multi-fingered manipulation shares an intrinsic model. However, a lack of research remains to identify the data-driven evidence for further research. This paper explores a unified formulation of the loco-manipulation problem using reinforcement learning (RL) by reconfiguring robotic limbs with an overconstrained design into multi-legged and multi-fingered robots. Such design reconfiguration allows for adopting a co-training architecture for reinforcement learning towards a unified loco-manipulation policy. As a result, we find data-driven evidence to support the transferability between locomotion and manipulation skills using a single RL policy with a multilayer perceptron or graph neural network. We also demonstrate the Sim2Real transfer of the learned loco-manipulation skills in a robotic prototype. This work expands the knowledge frontiers on loco-manipulation transferability with learning-based evidence applied in a novel platform with overconstrained robotic limbs.
运动和操作是机器人技术中的两项基本技能,但它们常常被分开或解耦为两个独立的问题。人们普遍认为,多足运动和多指操作之间的拓扑对偶性共享一个内在模型。然而,仍缺乏研究来确定进一步研究的数据驱动证据。本文通过将具有过约束设计的机器人肢体重新配置为多足和多指机器人,探索了一种使用强化学习(RL)的运动-操作问题的统一表述。这种设计重新配置允许采用一种协同训练架构进行强化学习,以实现统一的运动-操作策略。结果,我们找到了数据驱动的证据,支持使用具有多层感知器或图神经网络的单一强化学习策略在运动和操作技能之间进行可迁移性。我们还在一个机器人原型中展示了所学运动-操作技能从模拟到现实的迁移。这项工作利用应用于具有过约束机器人肢体的新型平台上的基于学习的证据,扩展了运动-操作可迁移性的知识前沿。