Guo Zhongyi, Ai Nana, Ge Wei, Xu Qingsong
Department of Electromechanical Engineering, Faculty of Science and Technology, University of Macau, Macau, China.
Department of Biomedical Sciences and Centre of Reproduction, Development and Aging (CRDA), Faculty of Health Sciences, University of Macau, Macau, China.
Microsyst Nanoeng. 2024 Jan 29;10:20. doi: 10.1038/s41378-023-00645-6. eCollection 2024.
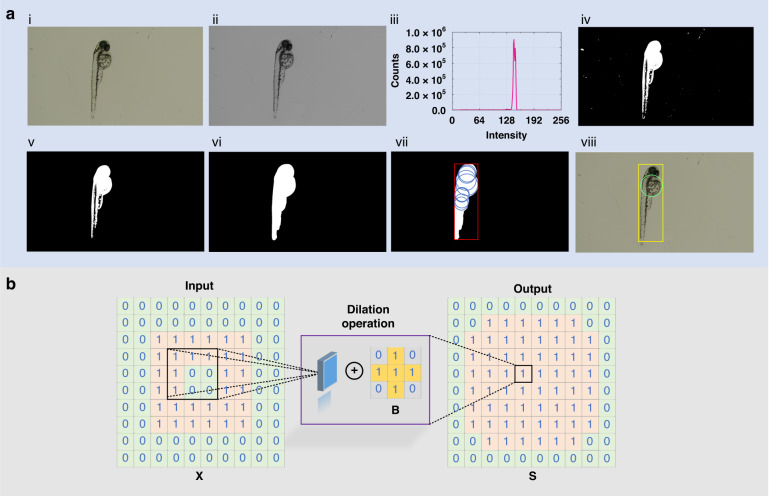
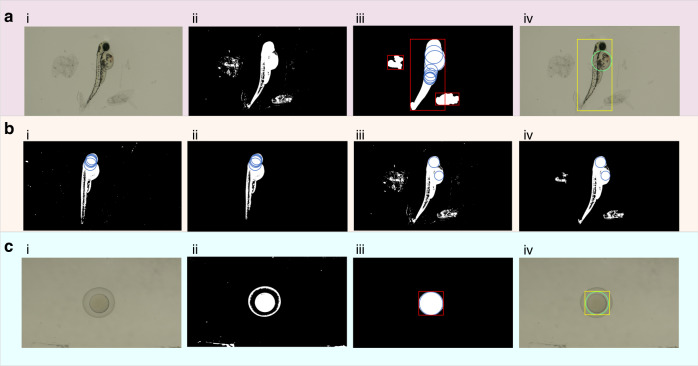
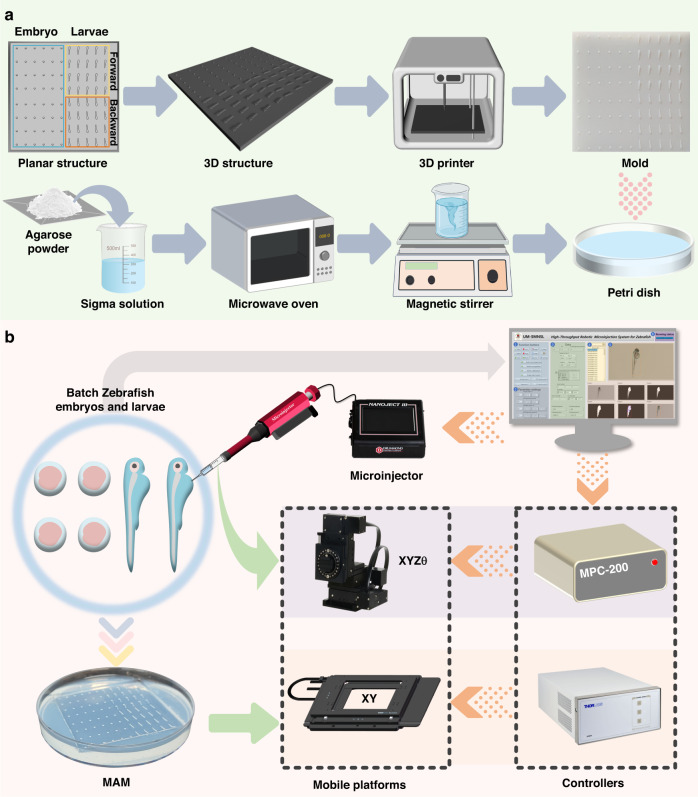
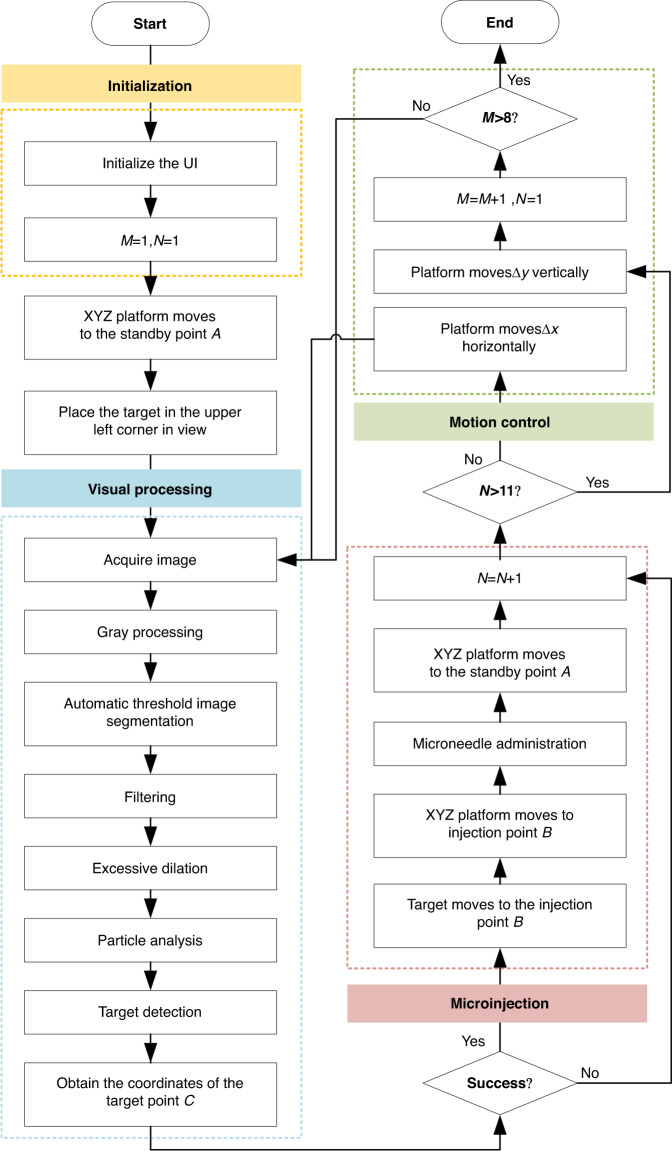
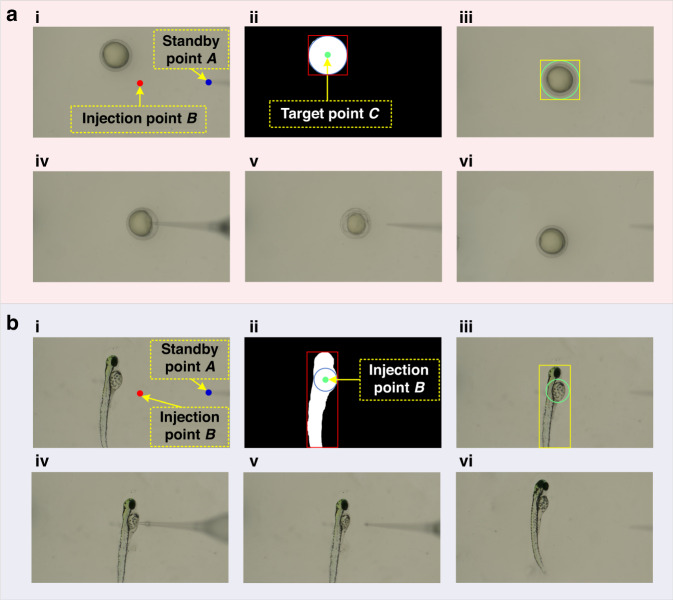
This paper presents the design of a vision-based automated robotic microinjection system for batch injection of both zebrafish embryos and larvae. A novel visual recognition algorithm based on an automatic threshold and excessive dilatation is introduced to accurately identify the center of zebrafish embryos and larval yolks. A corresponding software system is developed using the producer-consumer model as the framework structure, and a friendly user interface is designed to allow operators to choose from a range of desired functions according to their different needs. In addition, a novel microstructural agarose device is designed and fabricated to simultaneously immobilize mixed batches of embryos and larvae. Moreover, a prototype microinjection system is fabricated by integrating hardware devices with visual algorithms. An experimental study is conducted to verify the performance of the robotic microinjection system. The results show that the reported system can accurately identify zebrafish embryos and larvae and efficiently complete batch microinjection tasks of the mixtures with an injection success rate of 92.05% in 13.88 s per sample. Compared with manual and existing microinjection systems, the proposed system demonstrates the merits of versatility, excellent efficiency, high success rate, high survival rate, and sufficient stability.
本文介绍了一种基于视觉的自动化机器人显微注射系统的设计,用于对斑马鱼胚胎和幼体进行批量注射。引入了一种基于自动阈值和过度膨胀的新型视觉识别算法,以准确识别斑马鱼胚胎和幼体卵黄的中心。使用生产者-消费者模型作为框架结构开发了相应的软件系统,并设计了一个友好的用户界面,使操作人员能够根据不同需求从一系列所需功能中进行选择。此外,设计并制造了一种新型的微观结构琼脂糖装置,用于同时固定混合批次的胚胎和幼体。此外,通过将硬件设备与视觉算法集成,制造了一个显微注射系统原型。进行了一项实验研究,以验证机器人显微注射系统的性能。结果表明,所报道的系统能够准确识别斑马鱼胚胎和幼体,并高效完成混合物的批量显微注射任务,每个样本的注射成功率为92.05%,注射时间为13.88秒。与手动和现有的显微注射系统相比,所提出的系统具有通用性强、效率高、成功率高、存活率高和稳定性好等优点。