School of Mechanical Engineering, Tongji University, Shanghai, 201804, China.
Translational Research Center, Shanghai YangZhi Rehabilitation Hospital (Shanghai Sunshine Rehabilitation Center), Tongji University, Shanghai, 201619, China.
Nat Commun. 2024 Feb 26;15(1):1760. doi: 10.1038/s41467-024-46249-0.
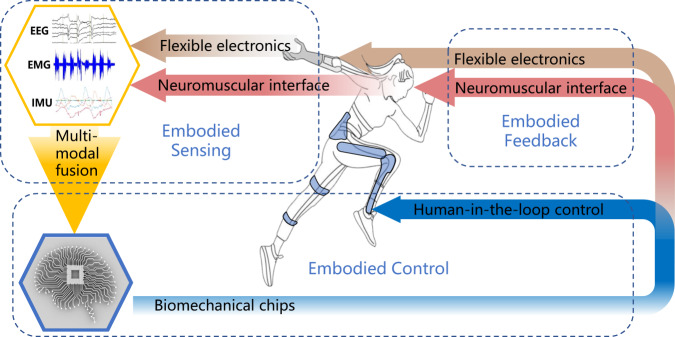
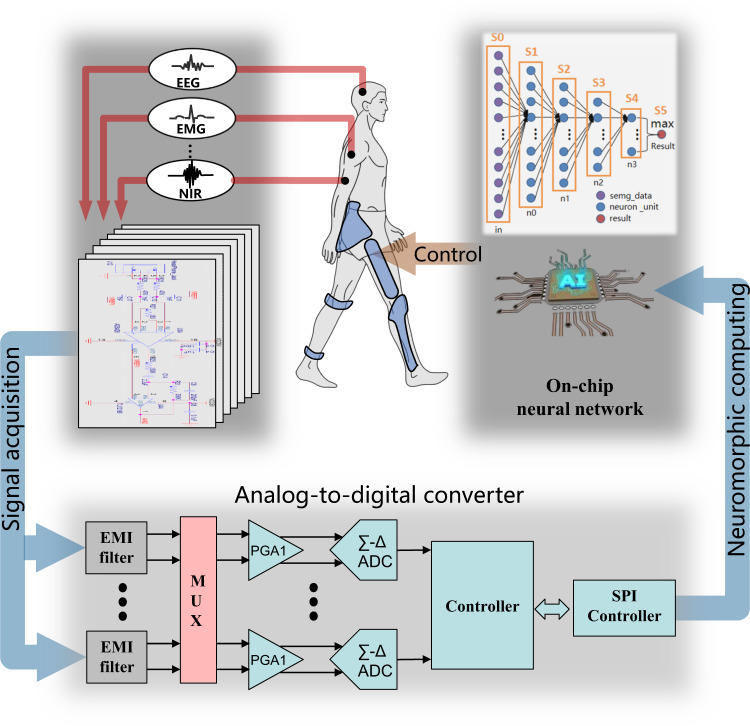
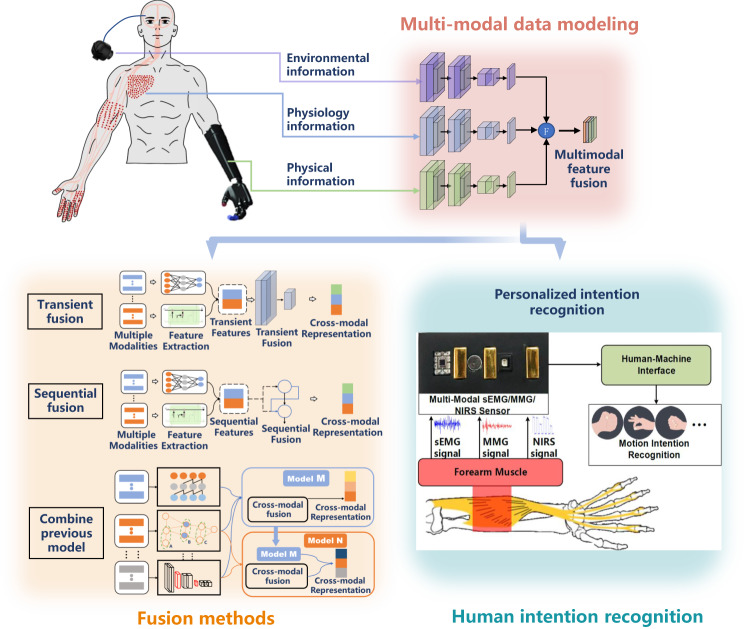
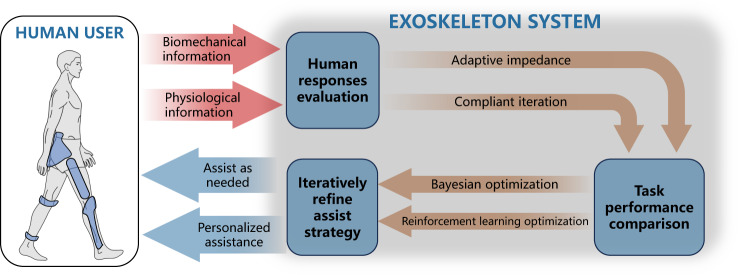
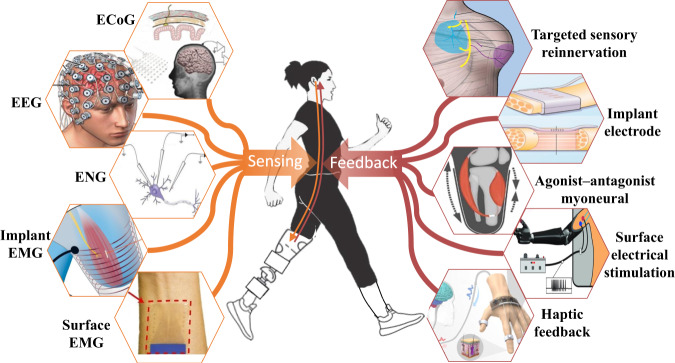
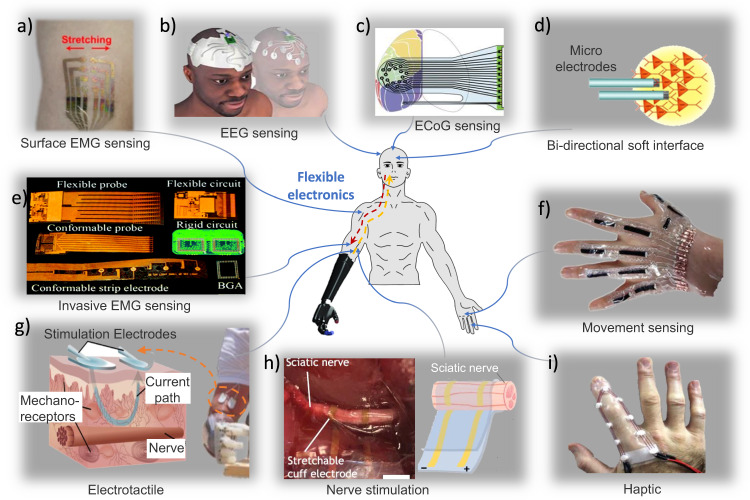
Most wearable robots such as exoskeletons and prostheses can operate with dexterity, while wearers do not perceive them as part of their bodies. In this perspective, we contend that integrating environmental, physiological, and physical information through multi-modal fusion, incorporating human-in-the-loop control, utilizing neuromuscular interface, employing flexible electronics, and acquiring and processing human-robot information with biomechatronic chips, should all be leveraged towards building the next generation of wearable robots. These technologies could improve the embodiment of wearable robots. With optimizations in mechanical structure and clinical training, the next generation of wearable robots should better facilitate human motor and sensory reconstruction and enhancement.
大多数可穿戴机器人,如外骨骼和假肢,都可以具有灵巧的操作能力,而佩戴者并不将其视为身体的一部分。从这个角度来看,我们认为通过多模态融合整合环境、生理和物理信息,结合人机控制,利用神经肌肉接口,采用柔性电子技术,并利用生物机电芯片获取和处理人机信息,都应该用于构建下一代可穿戴机器人。这些技术可以改善可穿戴机器人的体现。通过对机械结构和临床训练进行优化,下一代可穿戴机器人应该能够更好地促进人类运动和感觉的重建和增强。