Wang Shiqiang, Liu Shiqing, Zhang Jingfeng, Yu Zhouyang, Shao Yifan, Zhao Cong, Ma Jiahong, Fu Xin, Yang Mengqi, Chen Lie, Liu Mingjie, Wen Li
School of Mechanical Engineering and Automation, Beihang University, Beijing, 100191, China.
Sino-French Carbon Neutrality Research Center, Ecole Centrale de Pekin/School of General Engineering, Beihang University, Beijing, 100191, China.
Adv Sci (Weinh). 2025 Jul;12(26):e2414761. doi: 10.1002/advs.202414761. Epub 2025 Mar 26.
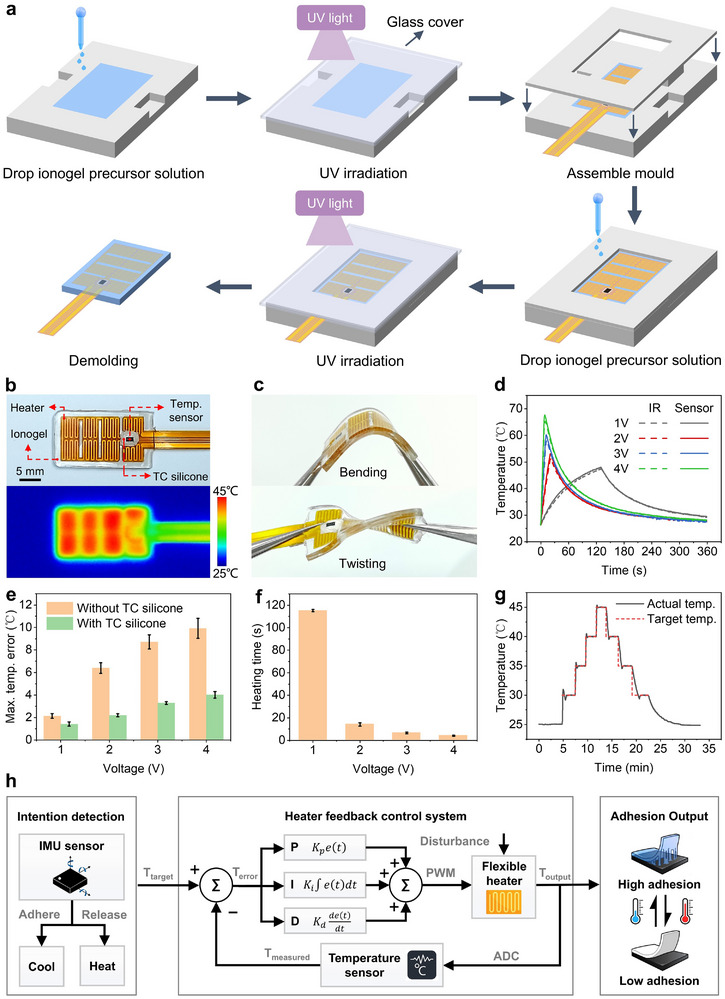
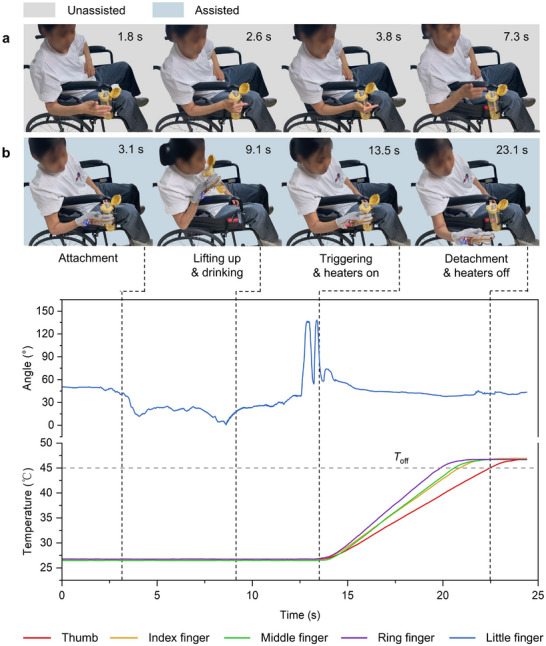
Rheumatic diseases often result in joint deformities and peripheral nerve damage, leading to impaired hand function. Current wearable assistive gloves commonly rely on external forces to flex fingers for grasping, but they face limitations such as bulky hardware, complex finger manipulation, and a risk of joint injuries. This study presents a lightweight, portable, soft wearable adhesive glove based on thermoresponsive ionogels aimed at enhancing grasping function. The ionogel exhibits high adhesion (≈35 kPa to various materials) at 25 °C and low adhesion (≈6.8 kPa) at 45 °C. Smart adhesive pads use embedded flexible heaters and temperature sensors for closed-loop control of the ionogels' temperature, providing programmable adhesion. A rapid switch from high to low adhesion is achieved within 4 s at 4 V. Additionally, a hands-free control interface uses inertial measurement units to detect the user's intent to release, facilitating easy and intuitive detachment. Weighing only 47 g, the glove is 7.2 times lighter than existing assistive gloves. Notably, it empowers users to grasp and release a variety of objects that will otherwise be unmanageable. Evaluation of various activities of daily living demonstrates that the glove significantly enhances grasping ability and increases autonomy for patients with rheumatic diseases.
风湿性疾病常导致关节畸形和周围神经损伤,进而导致手部功能受损。目前的可穿戴辅助手套通常依靠外力来弯曲手指进行抓握,但它们面临着诸如硬件笨重、手指操作复杂以及有造成关节损伤的风险等局限性。本研究提出了一种基于热响应离子凝胶的轻便、便携、柔软的可穿戴粘性手套,旨在增强抓握功能。该离子凝胶在25℃时表现出高粘附力(对各种材料约为35kPa),在45℃时表现出低粘附力(约6.8kPa)。智能粘性垫使用嵌入式柔性加热器和温度传感器对离子凝胶的温度进行闭环控制,提供可编程的粘附力。在4V电压下,能在4秒内实现从高粘附力到低粘附力的快速切换。此外,一种免提控制界面使用惯性测量单元来检测用户松开的意图,便于轻松、直观地脱开。该手套仅重47g,比现有的辅助手套轻7.2倍。值得注意的是,它使用户能够抓握和松开各种原本难以处理的物体。对各种日常生活活动的评估表明,该手套显著增强了抓握能力,并提高了风湿性疾病患者的自主性。