Department of Clinical Medicine and Surgery, ″Federico II″ University of Naples, Via Sergio Pansini, 5, 80131, Naples, Italy.
Department of Health Science, University of Milan, 20142, Milan, Italy.
Langenbecks Arch Surg. 2024 Mar 22;409(1):103. doi: 10.1007/s00423-024-03290-3.
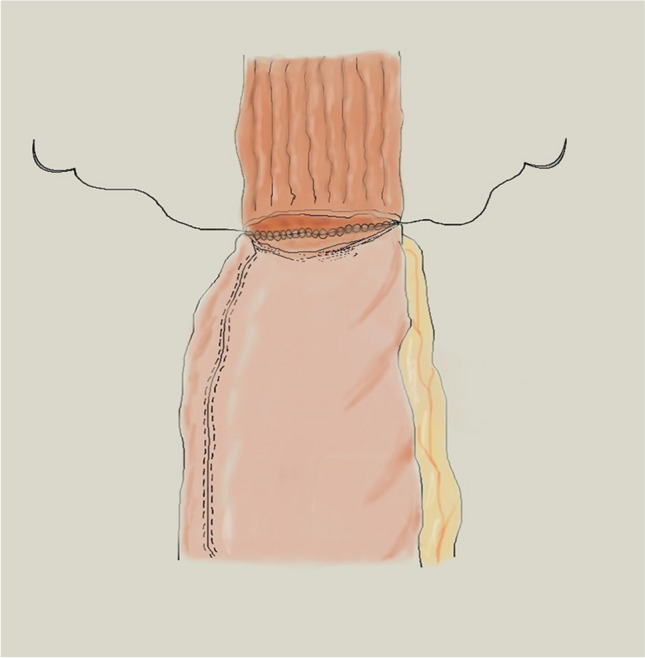
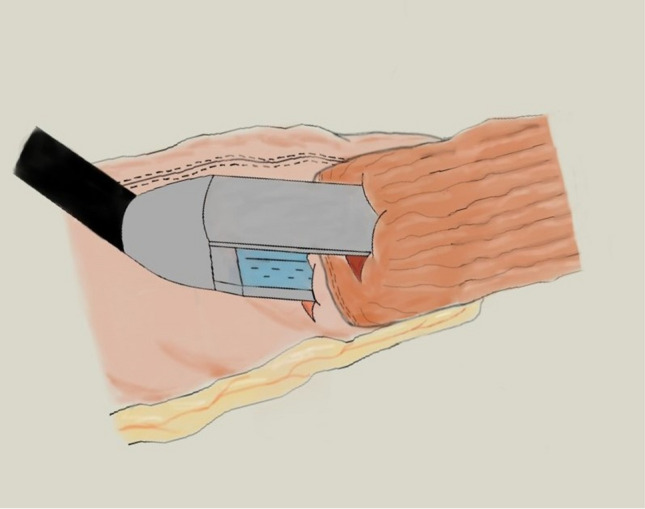
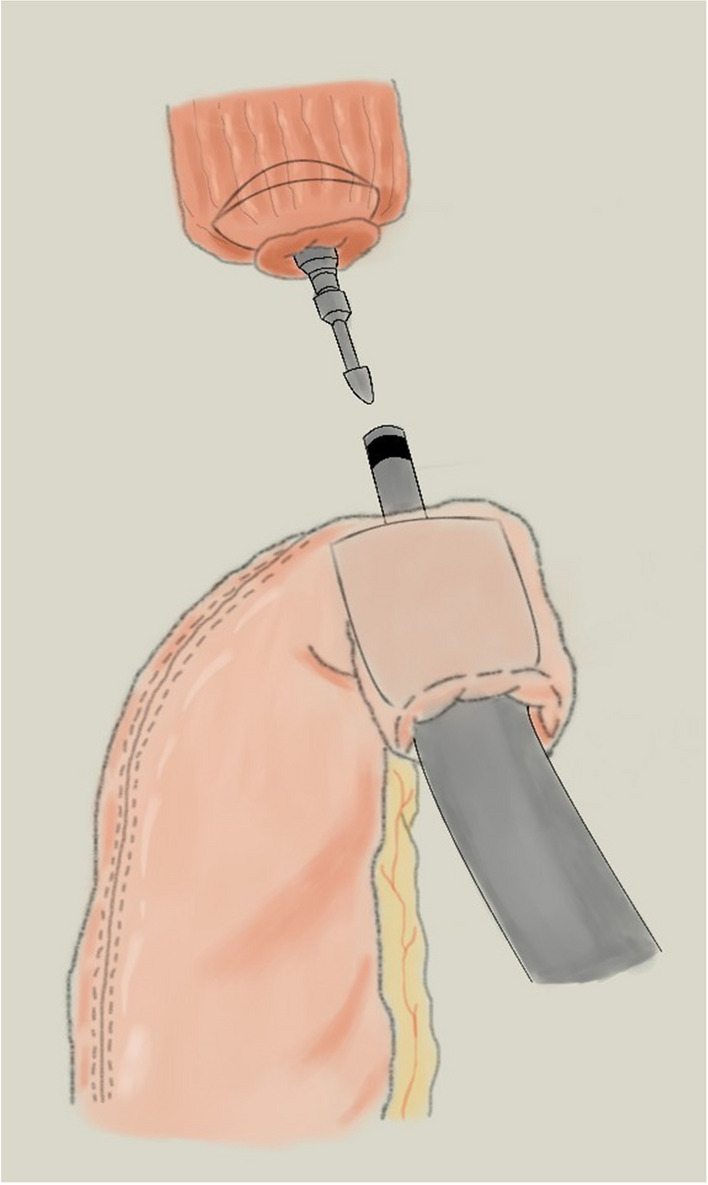
The aim of the present study is to compare outcomes of the robotic hand-sewn, linear- and circular-stapled techniques performed to create an intrathoracic esophagogastric anastomosis in patients who underwent Ivor-Lewis esophagectomy.
Patients who underwent a planned Ivor-Lewis esophagectomy were retrospectively analysed from prospectively maintained databases. Only patients who underwent a robotic thoracic approach with the creation of an intrathoracic esophagogastric anastomosis were included in the study. Patients were divided into three groups: hand-sewn-, circular stapled-, and linear-stapled anastomosis group. Demographic information and surgery-related data were extracted. The primary outcome was the rate of anastomotic leakages (AL) in the three groups. Moreover, the rate of grade A, B and C anastomotic leakage were evaluated. In addition, patients of each group were divided in subgroups according to the characteristics of anastomotic fashioning technique.
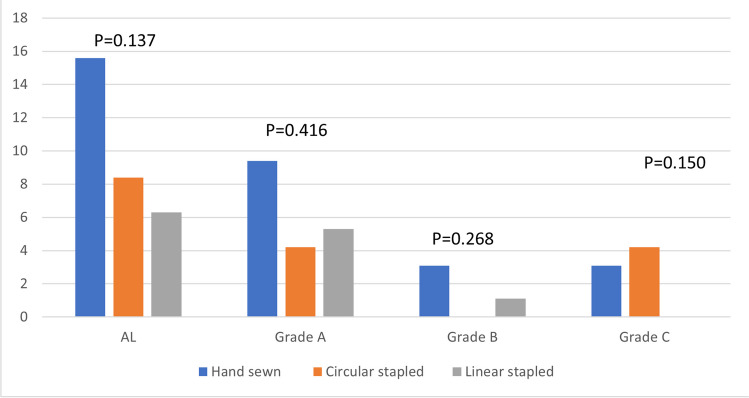
Two hundred and thirty patients were enrolled in the study. No significant differences were found between the three groups about AL rate (p = 0.137). Considering the management of the AL for each of the three groups, no significant differences were found. Evaluating the correlation between AL rate and the characteristics of anastomotic fashioning technique, no significant differences were found.
No standardized anastomotic fashioning technique has yet been generally accepted. This study could be considered a call to perform ad hoc high-quality studies involving high-volume centers for upper gastrointestinal surgery to evaluate what is the most advantageous anastomotic technique.
本研究旨在比较在行 Ivor-Lewis 食管癌切除术的患者中,使用机器人手工缝合、线性吻合器和圆形吻合器技术行胸内食管胃吻合术的结果。
从前瞻性维护的数据库中回顾性分析行计划的 Ivor-Lewis 食管癌切除术的患者。仅纳入接受机器人辅助胸腔入路并进行胸内食管胃吻合术的患者。将患者分为三组:手工吻合组、圆形吻合器吻合组和线性吻合器吻合组。提取人口统计学信息和手术相关数据。主要结局是三组吻合口漏的发生率(AL)。此外,评估了 A、B 和 C 级吻合口漏的发生率。此外,根据吻合方式的特点,将每组患者分为亚组。
本研究共纳入 230 例患者。三组间 AL 发生率无显著差异(p=0.137)。对于三组的每一组,考虑到 AL 的处理,均未发现显著差异。评估 AL 发生率与吻合方式特点之间的相关性,未发现显著差异。
尚未普遍接受标准化的吻合方式。本研究可被视为呼吁开展涉及上消化道手术的高容量中心的专门高质量研究,以评估哪种吻合技术最有利。