Wong Andy, Taghian Jazi Mehran, Takeuchi Tomoharu, Günther Johannes, Zaïane Osmar
Computing Science Department, Alberta Machine Intelligence Institute, University of Alberta, Edmonton, AB, Canada.
Information Technology R&D Center, Mitsubishi Electric Co., Kamakura, Japan.
Front Robot AI. 2024 Mar 13;11:1214043. doi: 10.3389/frobt.2024.1214043. eCollection 2024.
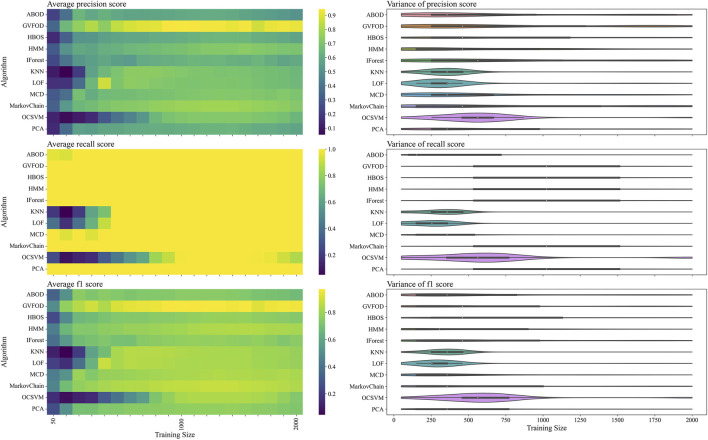
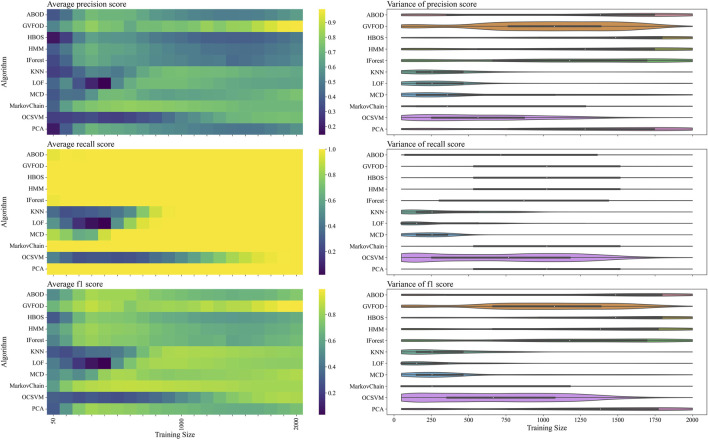
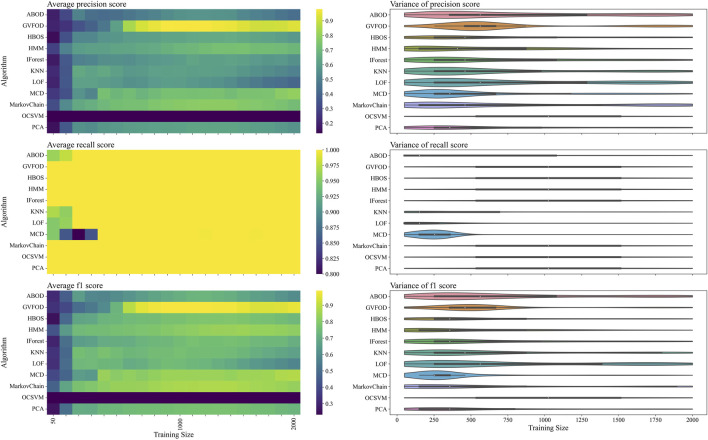
One of the greatest challenges to the automated production of goods is equipment malfunction. Ideally, machines should be able to automatically predict and detect operational faults in order to minimize downtime and plan for timely maintenance. While traditional condition-based maintenance (CBM) involves costly sensor additions and engineering, machine learning approaches offer the potential to learn from already existing sensors. Implementations of data-driven CBM typically use supervised and semi-supervised learning to classify faults. In addition to a large collection of operation data, records of faulty operation are also necessary, which are often costly to obtain. Instead of classifying faults, we use an approach to detect abnormal behaviour within the machine's operation. This approach is analogous to semi-supervised anomaly detection in machine learning (ML), with important distinctions in experimental design and evaluation specific to the problem of industrial fault detection. We present a novel method of machine fault detection using temporal-difference learning and General Value Functions (GVFs). Using GVFs, we form a predictive model of sensor data to detect faulty behaviour. As sensor data from machines is not i.i.d. but closer to Markovian sampling, temporal-difference learning methods should be well suited for this data. We compare our GVF outlier detection (GVFOD) algorithm to a broad selection of multivariate and temporal outlier detection methods, using datasets collected from a tabletop robot emulating the movement of an industrial actuator. We find that not only does GVFOD achieve the same recall score as other multivariate OD algorithms, it attains significantly higher precision. Furthermore, GVFOD has intuitive hyperparameters which can be selected based upon expert knowledge of the application. Together, these findings allow for a more reliable detection of abnormal machine behaviour to allow ideal timing of maintenance; saving resources, time and cost.
货物自动化生产面临的最大挑战之一是设备故障。理想情况下,机器应能够自动预测和检测运行故障,以尽量减少停机时间并规划及时维护。虽然传统的基于状态的维护(CBM)涉及昂贵的传感器添加和工程设计,但机器学习方法提供了从现有传感器进行学习的潜力。数据驱动的CBM实现通常使用监督学习和半监督学习来对故障进行分类。除了大量的运行数据收集外,故障运行记录也是必要的,而获取这些记录往往成本很高。我们不是对故障进行分类,而是采用一种方法来检测机器运行中的异常行为。这种方法类似于机器学习(ML)中的半监督异常检测,但在实验设计和针对工业故障检测问题的评估方面有重要区别。我们提出了一种使用时间差分学习和通用价值函数(GVF)的机器故障检测新方法。使用GVF,我们形成了一个传感器数据的预测模型来检测故障行为。由于来自机器的传感器数据不是独立同分布的,而是更接近马尔可夫采样,时间差分学习方法应该非常适合这种数据。我们将我们的GVF异常值检测(GVFOD)算法与广泛选择的多变量和时间异常值检测方法进行比较,使用从模拟工业执行器运动的桌面机器人收集的数据集。我们发现,GVFOD不仅与其他多变量OD算法具有相同的召回率得分,而且获得了显著更高的精度。此外,GVFOD具有直观的超参数,可以根据应用的专业知识进行选择。这些发现共同使得能够更可靠地检测机器异常行为,从而实现理想的维护时机;节省资源、时间和成本。