Jung Sumin, Kang Minchae, Han Min-Woo
Advanced Manufacturing & Soft Robotics Laboratory, Department of Mechanical Engineering, Dongguk University, 30 Pildong-ro 1, Jung-gu, Seoul 04620, Republic of Korea.
Polymers (Basel). 2024 May 2;16(9):1277. doi: 10.3390/polym16091277.
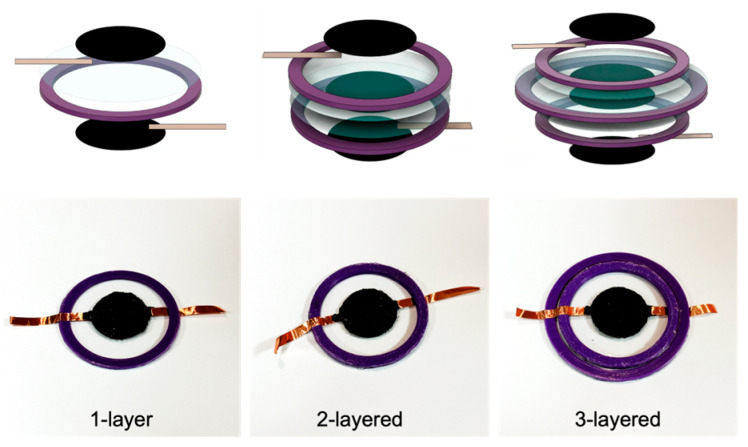
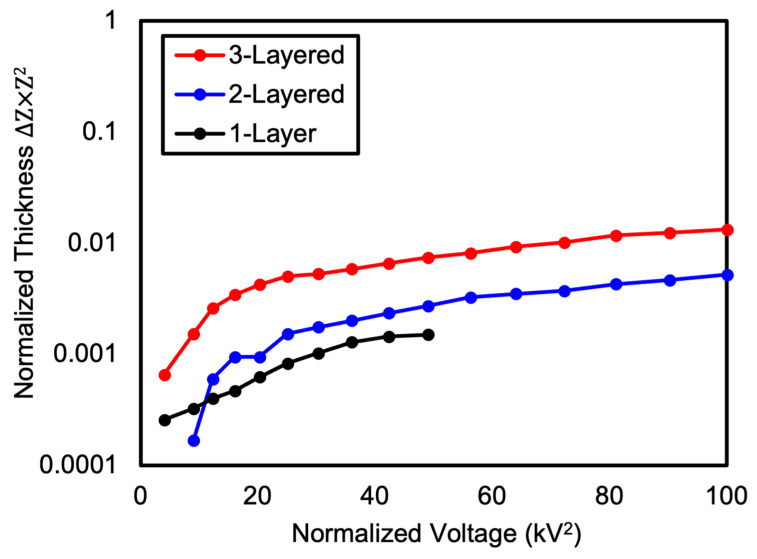
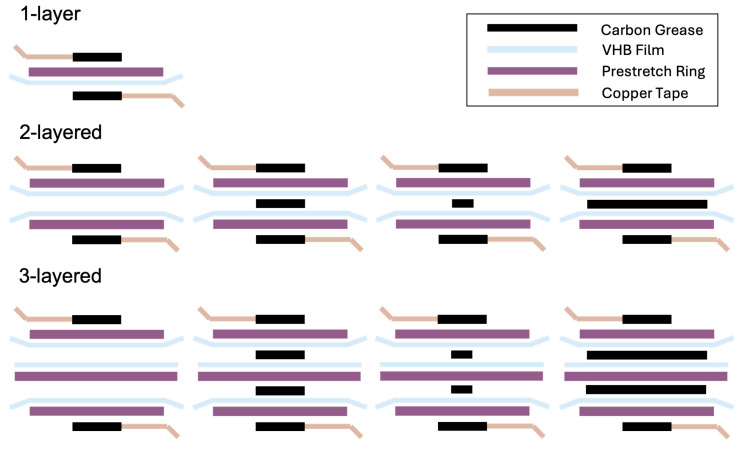
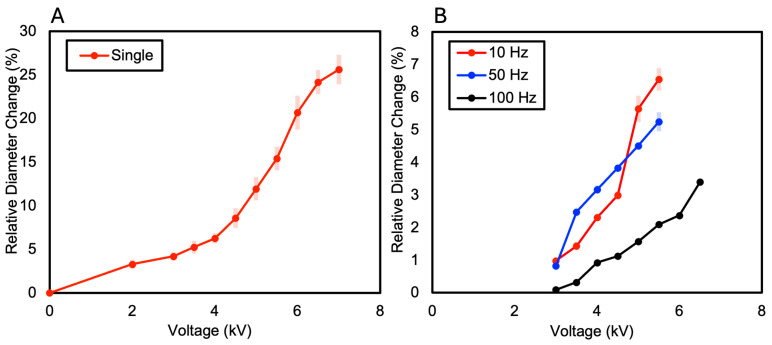
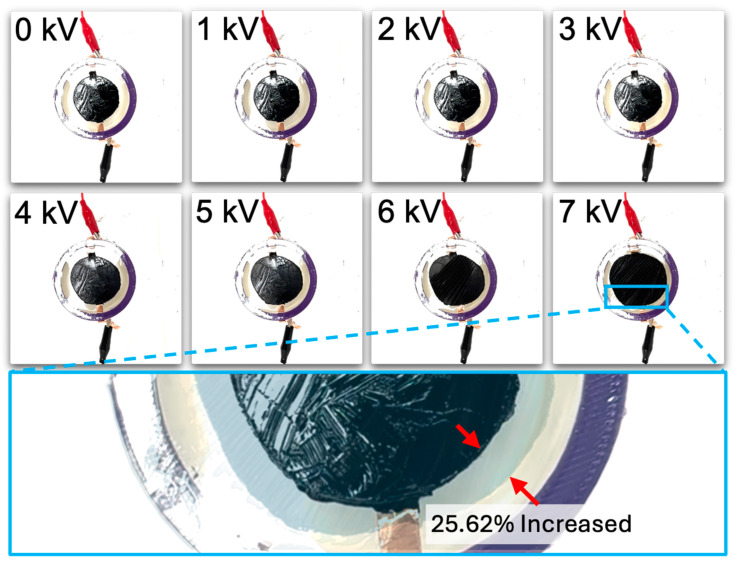
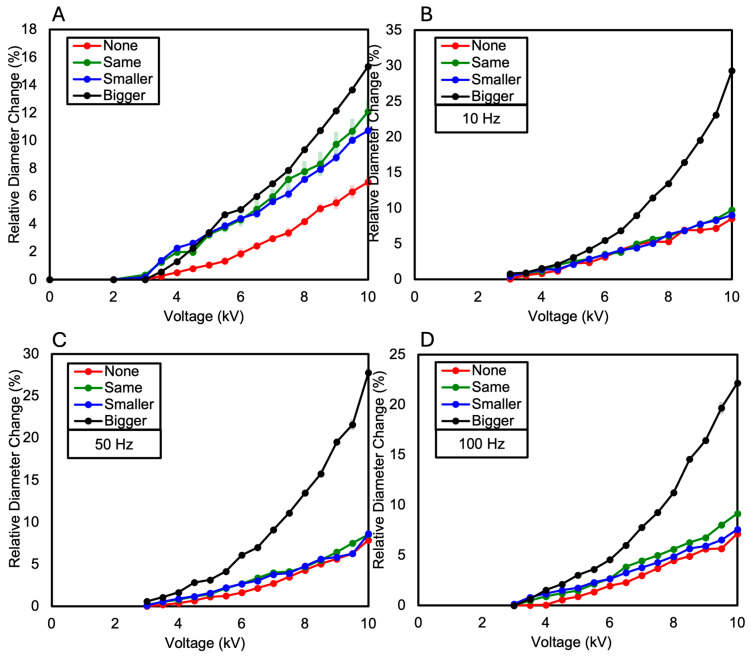
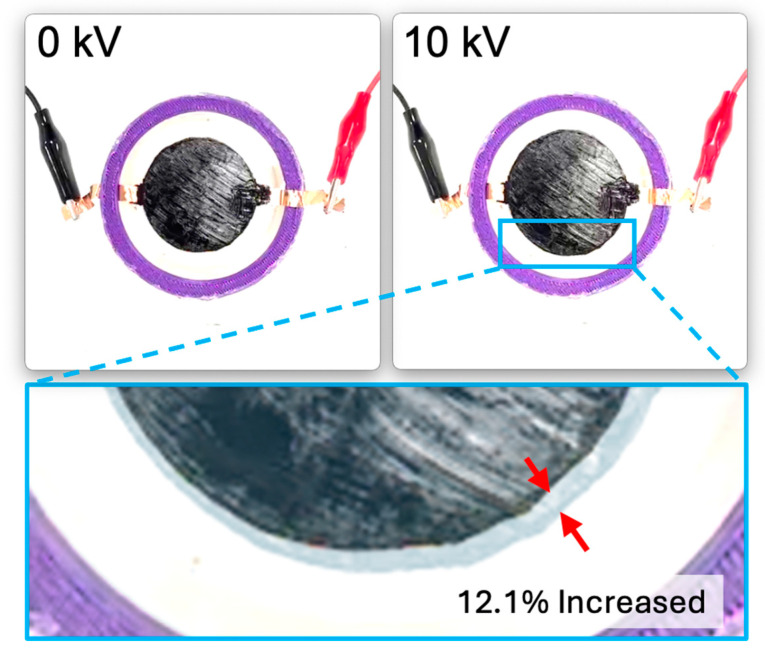
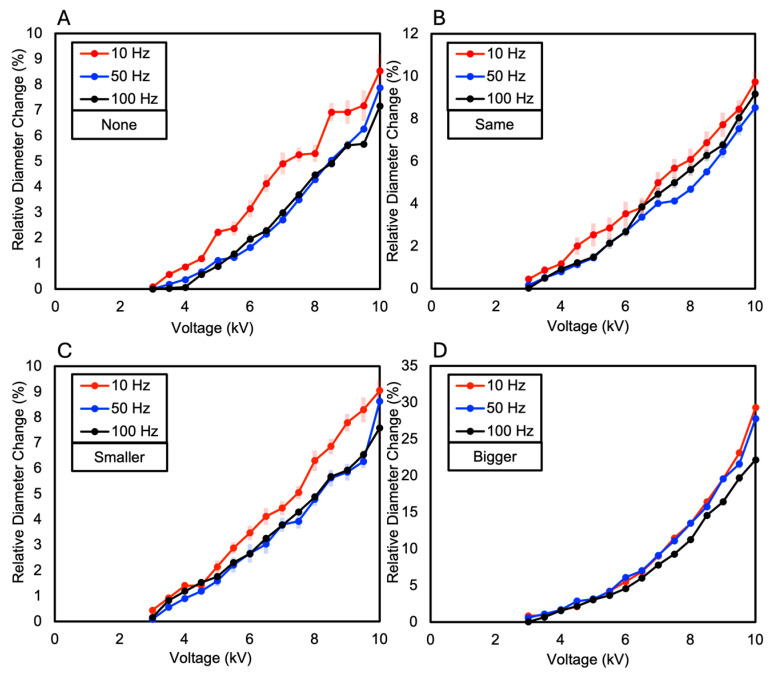
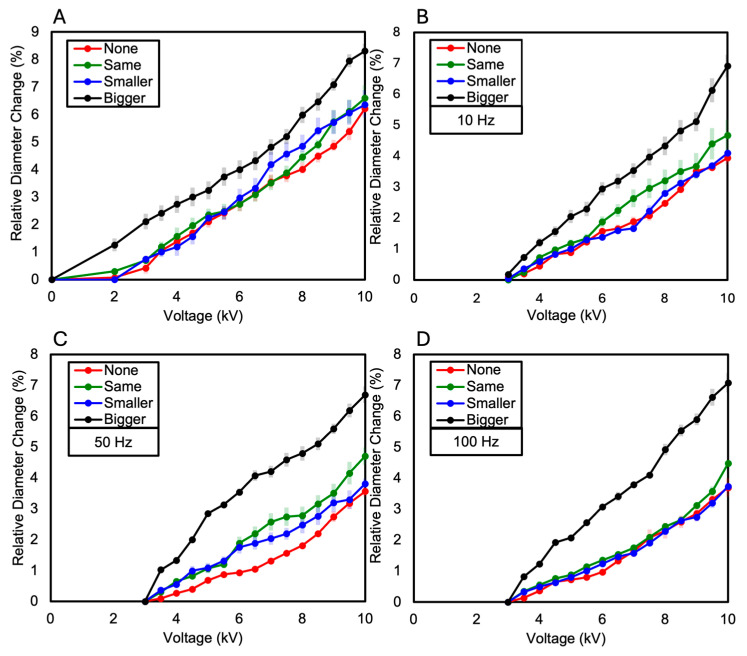
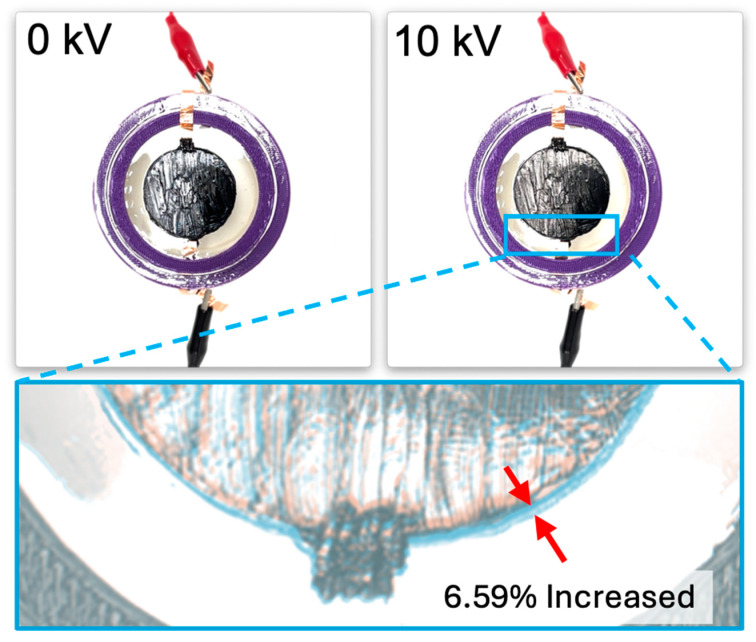
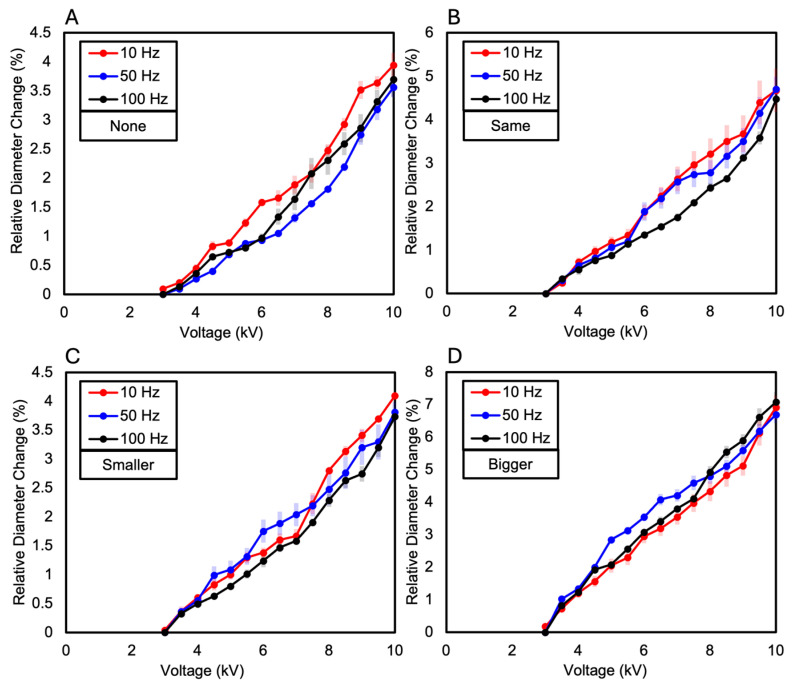
A Dielectric Elastomer Actuator (DEA) consists of electrodes with a dielectric layer between them. By controlling the design of the electrodes, voltage, and frequency, the operating range and speed of the DEA can be adjusted. These DEAs find applications in biomimetic robots, artificial muscles, and similar fields. When voltage is applied to the DEA, the dielectric layer undergoes compression and expansion due to electrostatic forces, which can lead to electrical breakdown. This phenomenon is closely related to the performance and lifespan of the DEA. To enhance stability and improve dielectric properties, a DEA Reservoir layer is introduced. Here, stability refers to the ability of the DEA to perform its functions even as the applied voltage increases. The Reservoir layer delays electrical breakdown and enhances stability due to its enhanced thickness. The proposed DEA in this paper is composed of a Reservoir layer and electrode layer. The Reservoir layer is placed between the electrode layers and is independently configured, not subjected to applied voltage like the electrode layers. The performance of the DEA was evaluated by varying the number of polymer layers in the Reservoir and electrode designs. Introducing the Reservoir layer improved the dielectric properties of the DEA and delayed electrical breakdown. Increasing the dielectric constant through the DEA Reservoir can enhance output characteristics in response to electrical signals. This approach can be utilized in various applications in wearable devices, artificial muscles, and other fields.
介电弹性体致动器(DEA)由中间夹有介电层的电极组成。通过控制电极的设计、电压和频率,可以调节DEA的工作范围和速度。这些DEA在仿生机器人、人造肌肉及类似领域有应用。当向DEA施加电压时,介电层会由于静电力而发生压缩和膨胀,这可能导致电击穿。这种现象与DEA的性能和寿命密切相关。为了提高稳定性并改善介电性能,引入了DEA储层层。这里,稳定性是指即使施加电压增加,DEA仍能执行其功能的能力。储层层由于其增加的厚度而延迟电击穿并提高稳定性。本文提出的DEA由储层层和电极层组成。储层层置于电极层之间且独立配置,不像电极层那样承受施加电压。通过改变储层和电极设计中的聚合物层数来评估DEA的性能。引入储层层改善了DEA的介电性能并延迟了电击穿。通过DEA储层增加介电常数可以增强对电信号的输出特性。这种方法可用于可穿戴设备、人造肌肉及其他领域的各种应用中。