rehaLab-the Laboratory for Rehabilitation Engineering, Institute for Human Centred Engineering HuCE, School of Engineering and Computer Science, Bern University of Applied Sciences, 2501, Biel, Switzerland.
Department of Rehabilitation Medicine, Faculty of Medicine and North-Eastern Stroke Research Group, Khon Kaen University, Khon Kaen, Thailand.
J Neuroeng Rehabil. 2024 Aug 12;21(1):141. doi: 10.1186/s12984-024-01440-8.
Patients with neurological disorders including stroke use rehabilitation to improve cognitive abilities, to regain motor function and to reduce the risk of further complications. Robotics-assisted tilt table technology has been developed to provide early mobilisation and to automate therapy involving the lower limbs. The aim of this study was to evaluate the feasibility of employing a feedback control system for heart rate (HR) during robotics-assisted tilt table exercise in patients after a stroke.
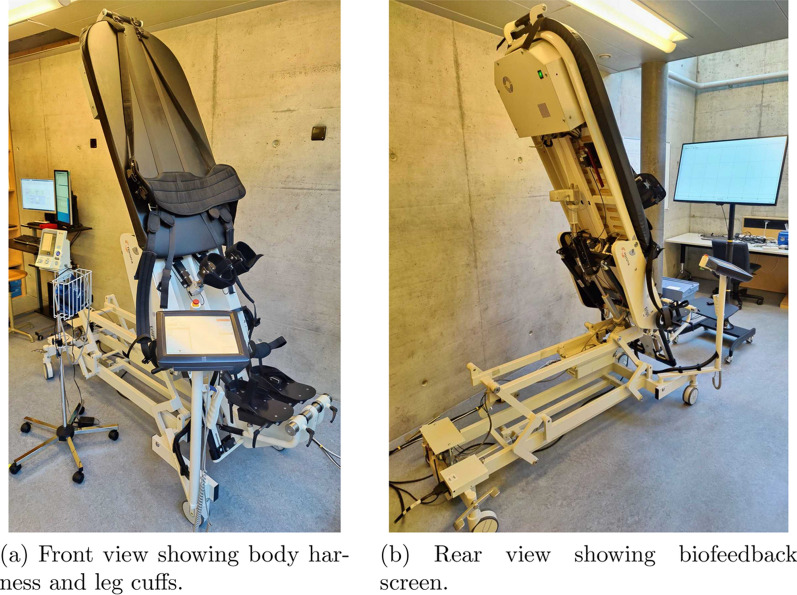
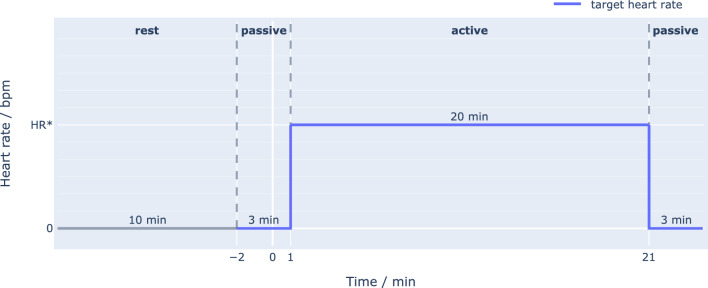
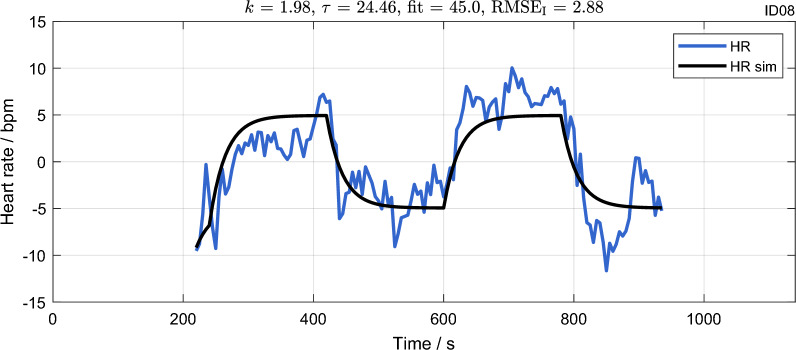
This feasibility study was designed as a case series with 12 patients ( ) with no restriction on the time post-stroke or on the degree of post-stroke impairment severity. A robotics-assisted tilt table was augmented with force sensors, a work rate estimation algorithm, and a biofeedback screen that facilitated volitional control of a target work rate. Dynamic models of HR response to changes in target work rate were estimated in system identification tests; nominal models were used to calculate the parameters of feedback controllers designed to give a specified closed-loop bandwidth; and the accuracy of HR control was assessed quantitatively in feedback control tests.
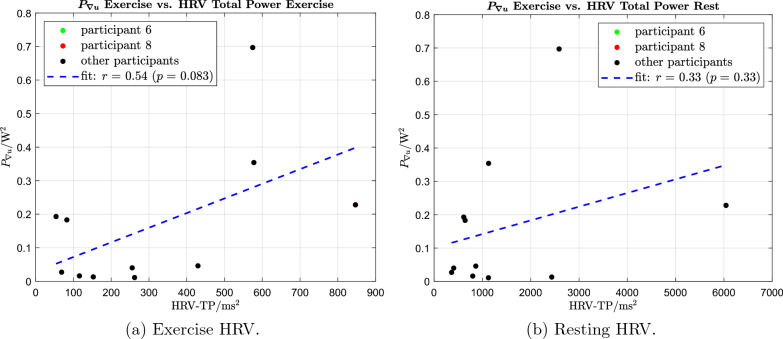
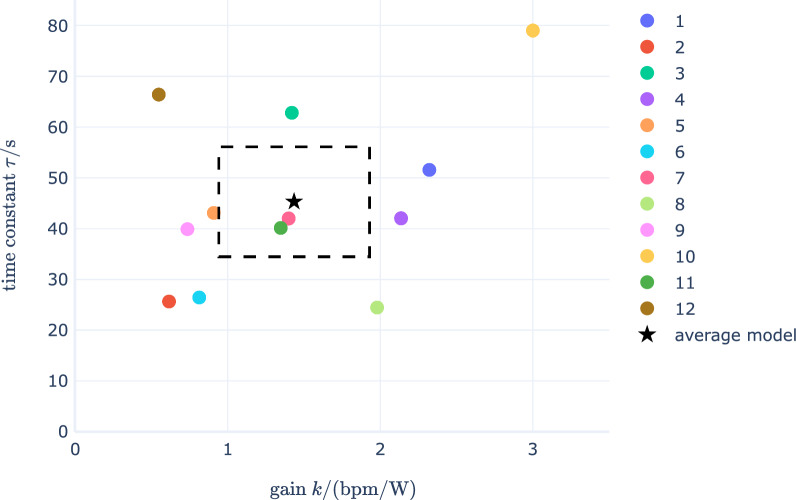
Feedback control tests were successfully conducted in all 12 patients. Dynamic models of heart rate response to imposed work rate were estimated with a mean root-mean-square (RMS) model error of 2.16 beats per minute (bpm), while highly accurate feedback control of heart rate was achieved with a mean RMS tracking error (RMSE) of 2.00 bpm. Control accuracy, i.e. RMSE, was found to be strongly correlated with the magnitude of heart rate variability (HRV): patients with a low magnitude of HRV had low RMSE, i.e. more accurate HR control performance, and vice versa.
Feedback control of heart rate during robotics-assisted tilt table exercise was found to be feasible. Future work should investigate robustness aspects of the feedback control system. Modifications to the exercise modality, or alternative modalities, should be explored that allow higher levels of work rate and heart rate intensity to be achieved.
包括中风在内的神经障碍患者使用康复来提高认知能力、恢复运动功能并降低进一步并发症的风险。机器人辅助倾斜台技术已经开发出来,用于提供早期运动并使涉及下肢的治疗自动化。本研究的目的是评估在中风后患者中使用心率(HR)反馈控制系统进行机器人辅助倾斜台运动的可行性。
这项可行性研究设计为病例系列,共有 12 名患者(),没有对中风后时间或中风后损伤严重程度的限制。机器人辅助倾斜台配备了力传感器、工作速率估计算法和生物反馈屏幕,以促进目标工作速率的自愿控制。在系统识别测试中估计了 HR 对目标工作速率变化的响应的动态模型;名义模型用于计算设计用于提供指定闭环带宽的反馈控制器的参数;并在反馈控制测试中定量评估 HR 控制的准确性。
所有 12 名患者均成功进行了反馈控制测试。使用平均均方根(RMS)模型误差为 2.16 次/分钟(bpm)估计了心率对施加的工作速率的响应动态模型,而心率的高度精确反馈控制实现了平均 RMS 跟踪误差(RMSE)为 2.00 bpm。控制精度,即 RMSE,被发现与心率变异性(HRV)的幅度强烈相关:HRV 幅度低的患者具有低 RMSE,即心率控制性能更准确,反之亦然。
发现机器人辅助倾斜台运动期间心率的反馈控制是可行的。未来的工作应该研究反馈控制系统的鲁棒性方面。应探索运动模式的修改或替代模式,以实现更高水平的工作速率和心率强度。