Department of Fish and Wildlife Conservation, Virginia Tech, Blacksburg, VA, United States of America.
National Council for Air and Stream Improvement, Inc., Blacksburg, VA, United States of America.
PLoS One. 2024 Oct 25;19(10):e0302640. doi: 10.1371/journal.pone.0302640. eCollection 2024.
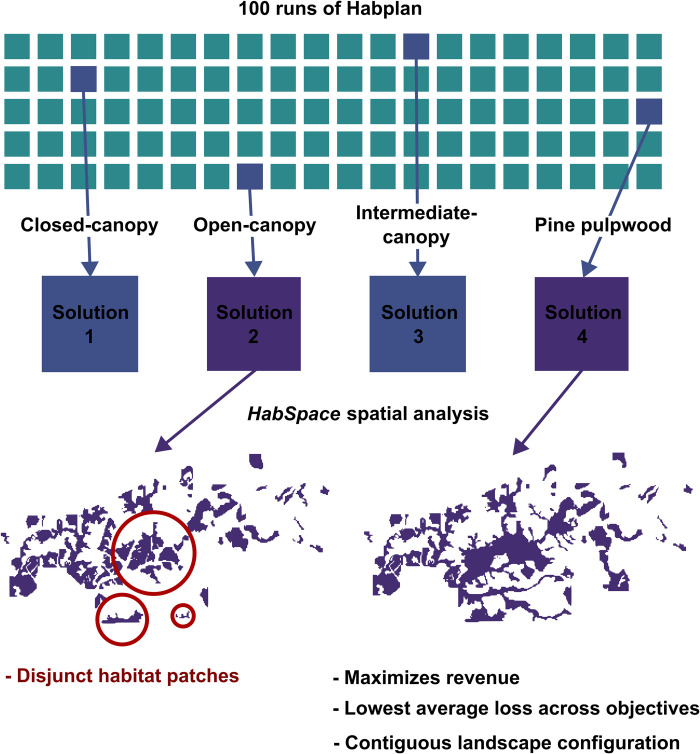
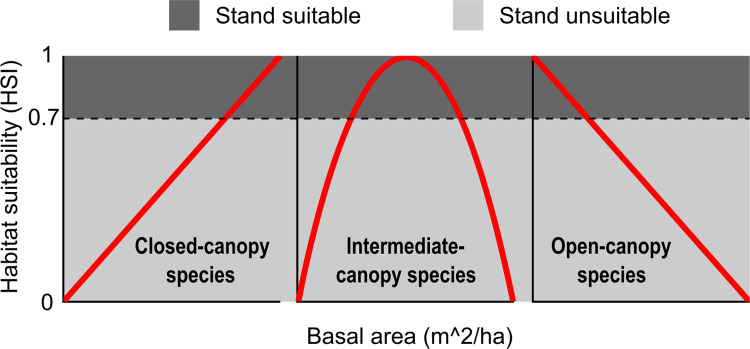
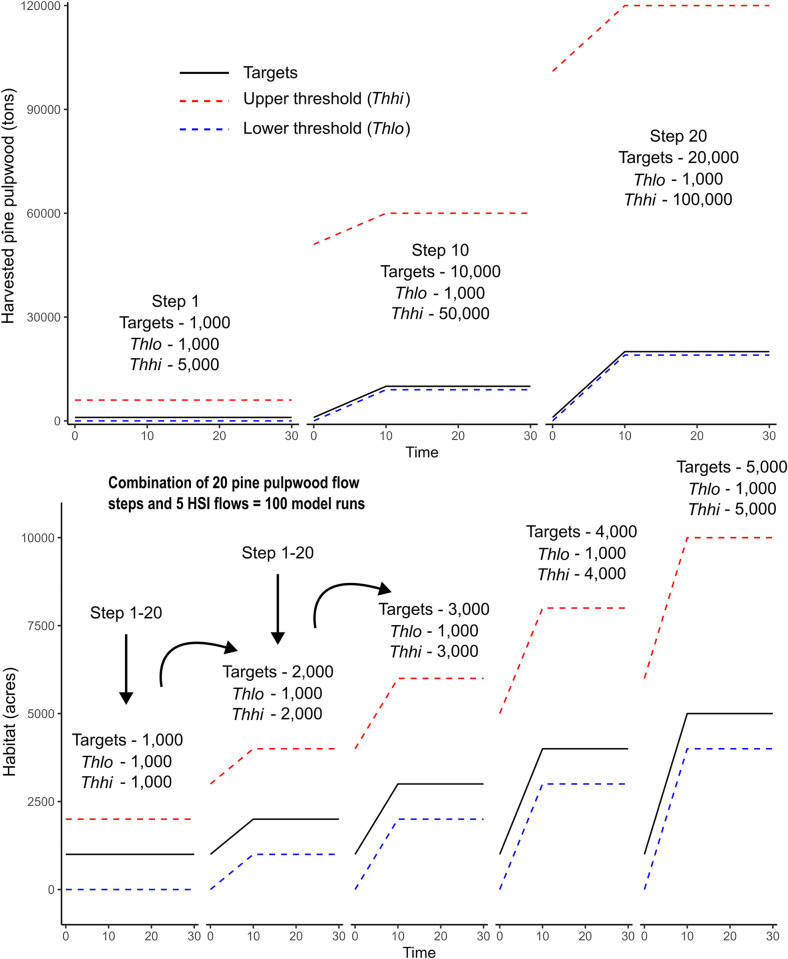
Sustainable forestry typically involves integration of several economic and ecological objectives which, at times, may not be compatible with one another. Multi-objective prioritization via harvest scheduling programs can be used to elucidate these relationships and explore solutions. One such program is a spatially explicit harvest scheduler that adopts the Metropolis-Hastings algorithm to iteratively find management solutions to achieve multiple objectives (Habplan). Although this program has been used to address forest management scheduling and simulation-based tasks, its utility is constrained by time-intensive data preparation and challenges with incorporating spatial configuration objectives. To address these shortcomings, we introduce an open-source software package, HabplanR, streamlines data preparation, sets parameters, visualizes results, and assesses spatial components of ecological objectives. We developed four example objectives to incorporate into a multi-objective management problem: habitat quality indices for three species "types" (open, closed, and intermediate-canopy-associated species), and harvested pine pulpwood (revenue). We demonstrate the utility of this package to find management schedules that can accommodate potentially conflicting habitat needs of species, while achieving economic targets. We produced 100 software runs and prioritized individual objectives to select four management schedules for further comparisons. We compared outcome differences of the four schedules, including a spatial comparison of two high performing schedules. The software package makes costs and benefits of different schedules explicit and allows for consideration of the spatial configuration of management outcomes in decision-making.
可持续林业通常涉及到几个经济和生态目标的整合,这些目标有时可能相互冲突。通过收获调度程序进行多目标优先级排序,可以阐明这些关系并探索解决方案。其中一个程序是空间显式的收获调度程序,它采用 Metropolis-Hastings 算法来迭代地找到管理解决方案,以实现多个目标(Habplan)。尽管该程序已被用于解决森林管理调度和基于模拟的任务,但由于数据准备时间密集和难以纳入空间配置目标,其应用受到限制。为了解决这些缺点,我们引入了一个开源软件包 HabplanR,简化了数据准备、设置参数、可视化结果,并评估了生态目标的空间组成部分。我们开发了四个示例目标,将其纳入多目标管理问题中:三种“类型”(开阔、封闭和中层林冠相关物种)的栖息地质量指数,以及收获的松木纸浆材(收入)。我们展示了该软件包在寻找管理计划方面的实用性,这些计划可以适应物种潜在冲突的栖息地需求,同时实现经济目标。我们进行了 100 次软件运行,并对各个目标进行了优先级排序,选择了四个管理计划进行进一步比较。我们比较了四个计划的结果差异,包括对两个表现良好的计划进行空间比较。该软件包使不同计划的成本和收益变得明确,并允许在决策中考虑管理结果的空间配置。