El-Gaby Mohamady, Harris Adam Loyd, Whittington James C R, Dorrell William, Bhomick Arya, Walton Mark E, Akam Thomas, Behrens Timothy E J
Nuffield Department of Clinical Neurosciences, University of Oxford, Oxford, UK.
Wellcome Centre for Integrative Neuroimaging, University of Oxford, Oxford, UK.
Nature. 2024 Dec;636(8043):671-680. doi: 10.1038/s41586-024-08145-x. Epub 2024 Nov 6.
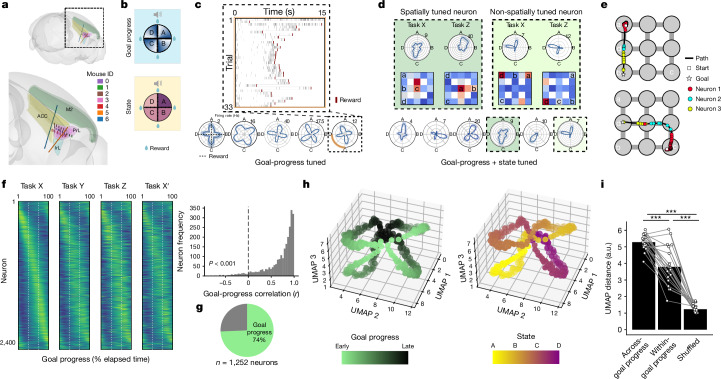
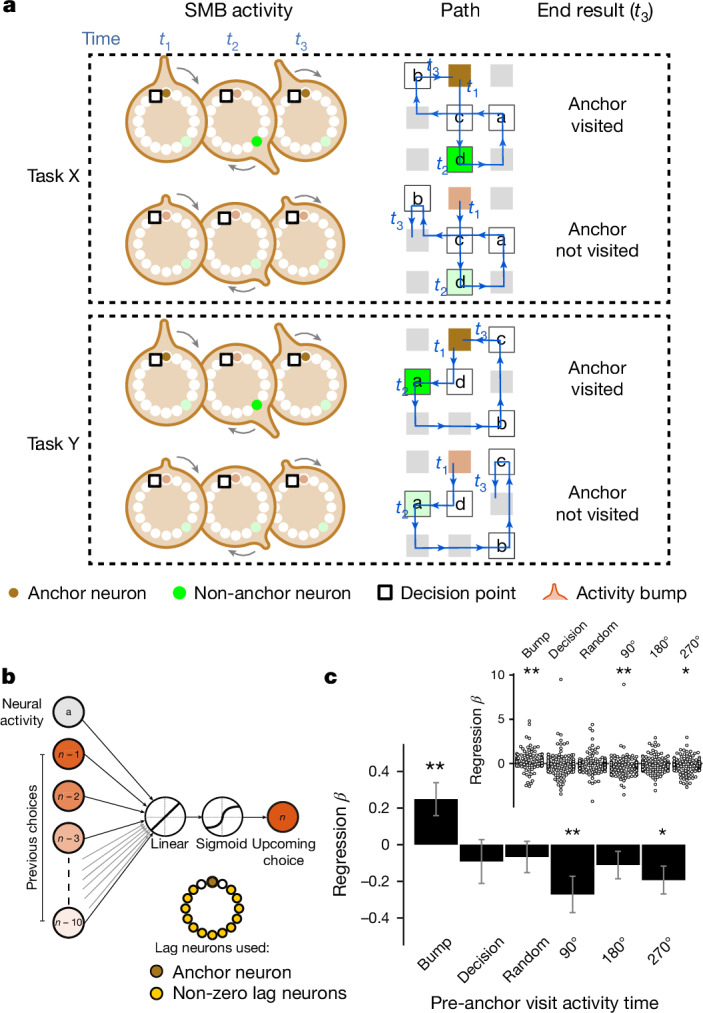
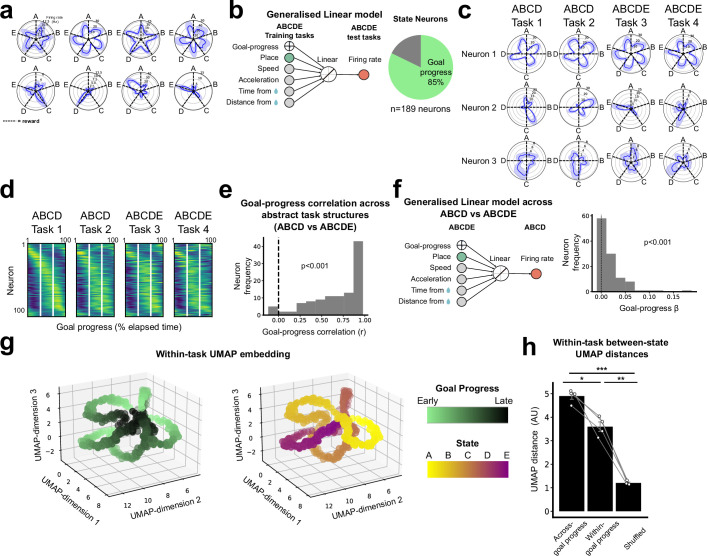
To flexibly adapt to new situations, our brains must understand the regularities in the world, as well as those in our own patterns of behaviour. A wealth of findings is beginning to reveal the algorithms that we use to map the outside world. However, the biological algorithms that map the complex structured behaviours that we compose to reach our goals remain unknown. Here we reveal a neuronal implementation of an algorithm for mapping abstract behavioural structure and transferring it to new scenarios. We trained mice on many tasks that shared a common structure (organizing a sequence of goals) but differed in the specific goal locations. The mice discovered the underlying task structure, enabling zero-shot inferences on the first trial of new tasks. The activity of most neurons in the medial frontal cortex tiled progress to goal, akin to how place cells map physical space. These 'goal-progress cells' generalized, stretching and compressing their tiling to accommodate different goal distances. By contrast, progress along the overall sequence of goals was not encoded explicitly. Instead, a subset of goal-progress cells was further tuned such that individual neurons fired with a fixed task lag from a particular behavioural step. Together, these cells acted as task-structured memory buffers, implementing an algorithm that instantaneously encoded the entire sequence of future behavioural steps, and whose dynamics automatically computed the appropriate action at each step. These dynamics mirrored the abstract task structure both on-task and during offline sleep. Our findings suggest that schemata of complex behavioural structures can be generated by sculpting progress-to-goal tuning into task-structured buffers of individual behavioural steps.
为了灵活适应新情况,我们的大脑必须了解世界的规律以及我们自身行为模式的规律。大量研究结果开始揭示我们用于描绘外部世界的算法。然而,用于描绘我们为实现目标而组合的复杂结构化行为的生物算法仍然未知。在这里,我们揭示了一种算法的神经元实现方式,该算法用于描绘抽象行为结构并将其转移到新场景中。我们在许多共享共同结构(组织一系列目标)但具体目标位置不同的任务上训练小鼠。小鼠发现了潜在的任务结构,从而能够在新任务的首次试验中进行零样本推理。内侧前额叶皮质中的大多数神经元的活动平铺至目标进展,类似于位置细胞描绘物理空间的方式。这些“目标进展细胞”具有通用性,会拉伸和压缩它们的平铺以适应不同的目标距离。相比之下,沿着目标的整个序列的进展并未被明确编码。相反,一部分目标进展细胞被进一步调整,使得单个神经元从特定行为步骤开始以固定的任务延迟放电。这些细胞共同充当任务结构化的记忆缓冲器,实现一种算法,该算法能即时编码未来行为步骤的整个序列,并且其动态变化会自动计算每个步骤的适当动作。这些动态变化在任务执行期间和离线睡眠期间都反映了抽象任务结构。我们的研究结果表明,复杂行为结构的图式可以通过将目标进展调整塑造为各个行为步骤的任务结构化缓冲器来生成。