Mohanraj Deepak, S Devakirubakaran, Balachandran Praveen Kumar
Department of Electrical and Electronics Engineering, KIT-Kalaignarkarunanidhi Institute of Technology, Kannampalayam post, Coimbatore, Tamil Nādu, 641402, India.
Center for Smart Energy Systems, Chennai Institute of Technology, Kundrathur, Chennai, Tamil Nadu, 600069, India.
Heliyon. 2024 Oct 20;10(20):e39598. doi: 10.1016/j.heliyon.2024.e39598. eCollection 2024 Oct 30.
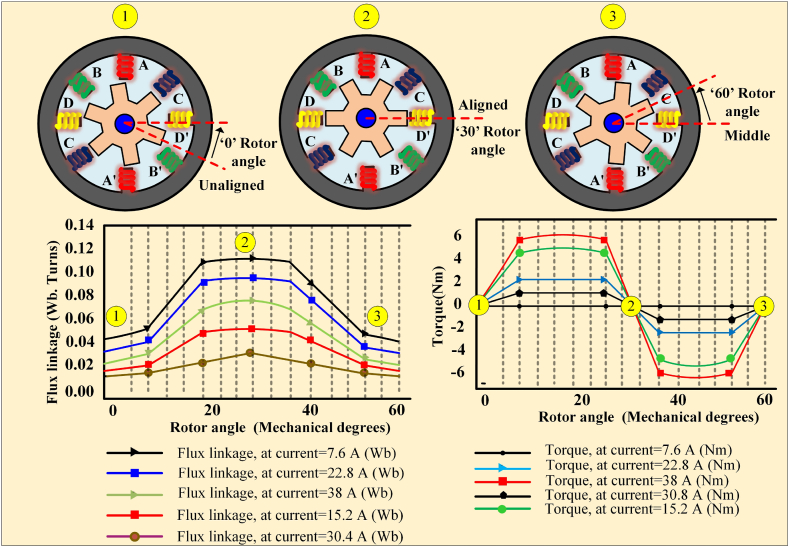
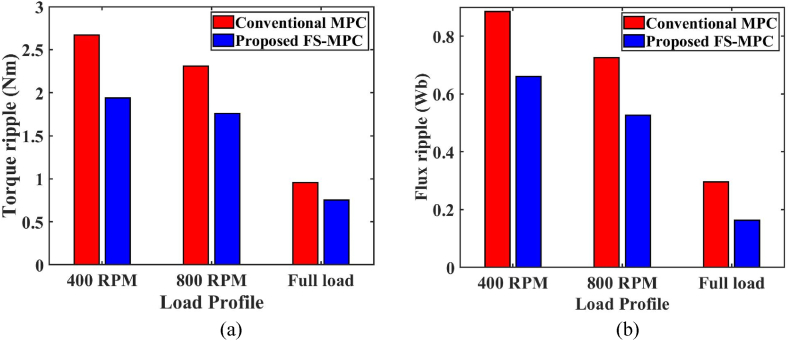
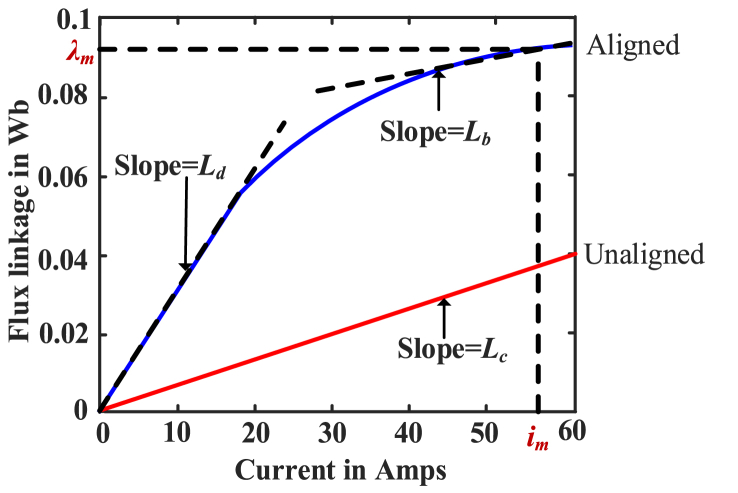
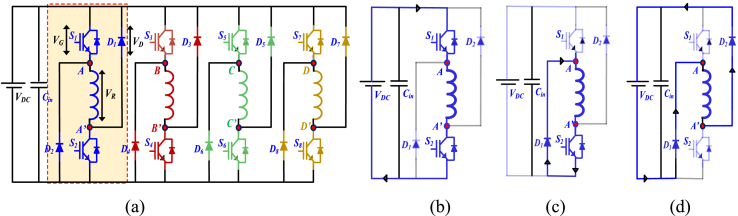
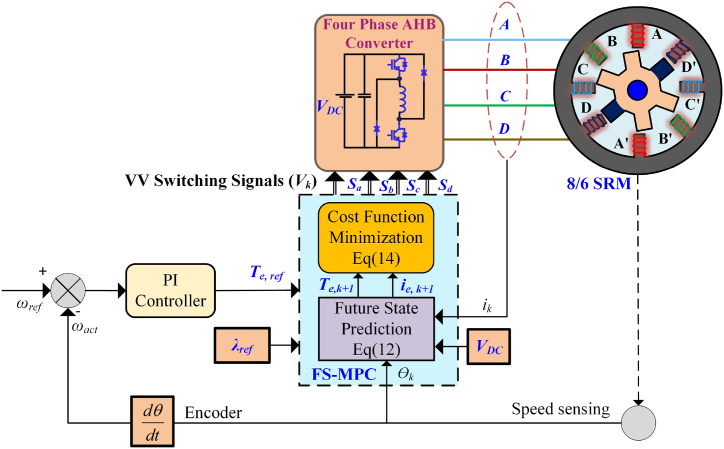
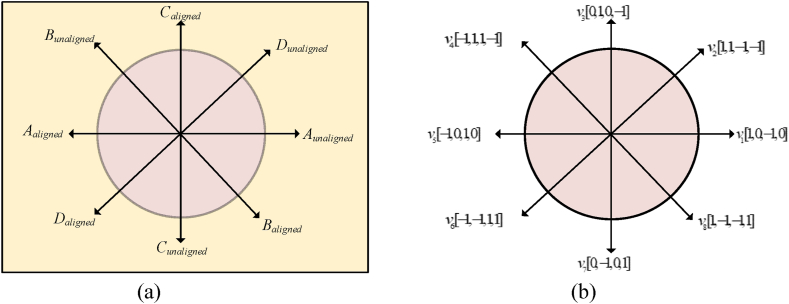
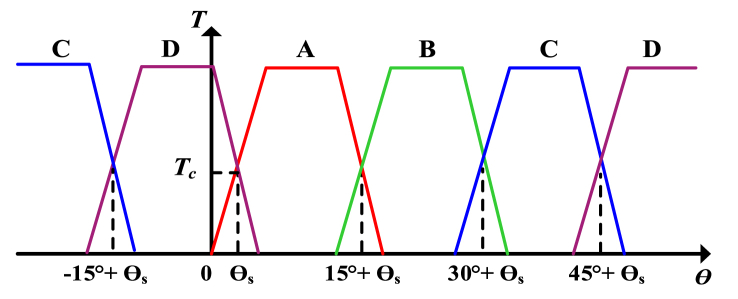
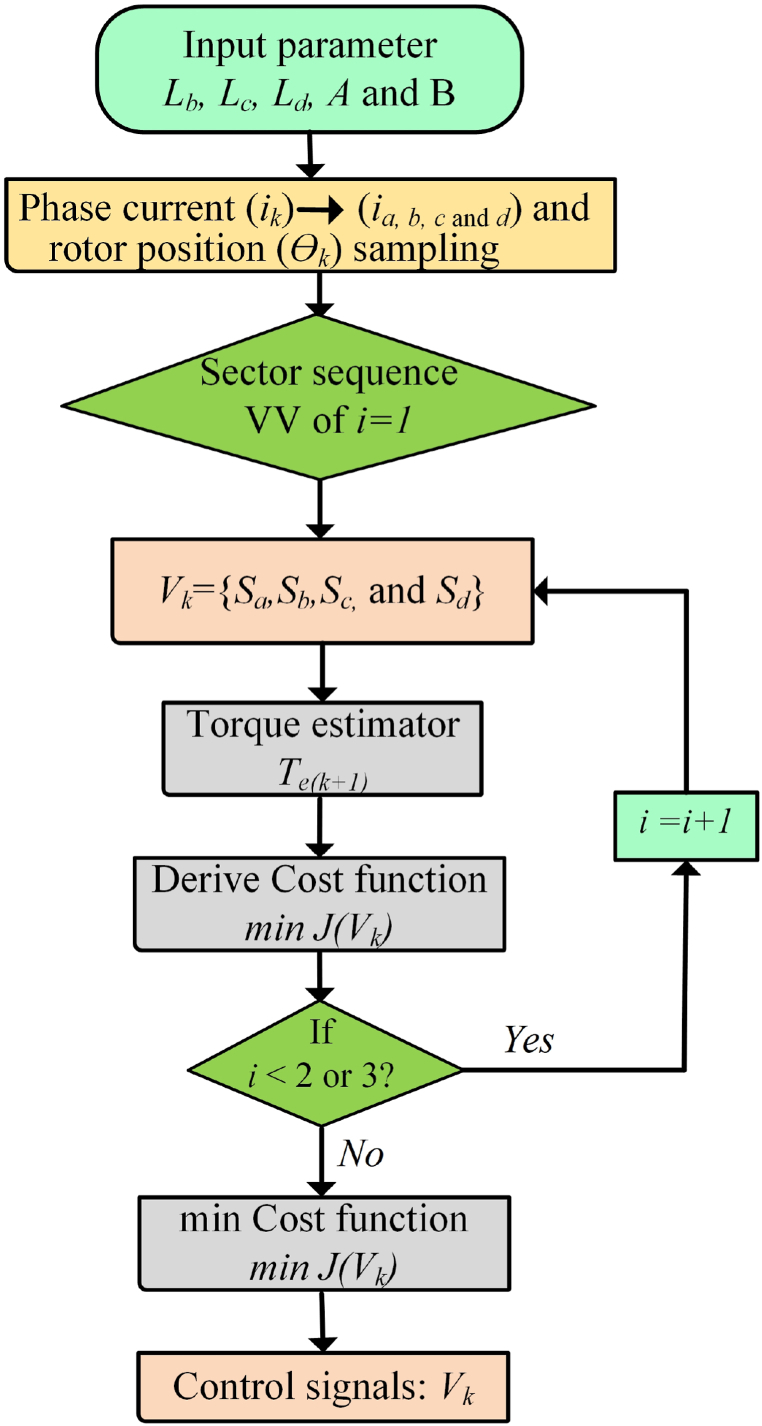
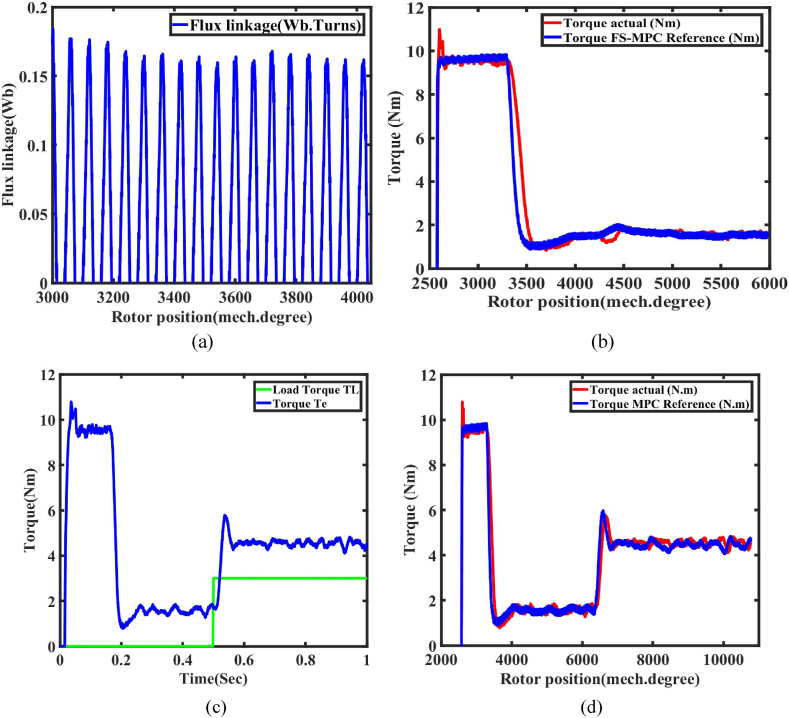
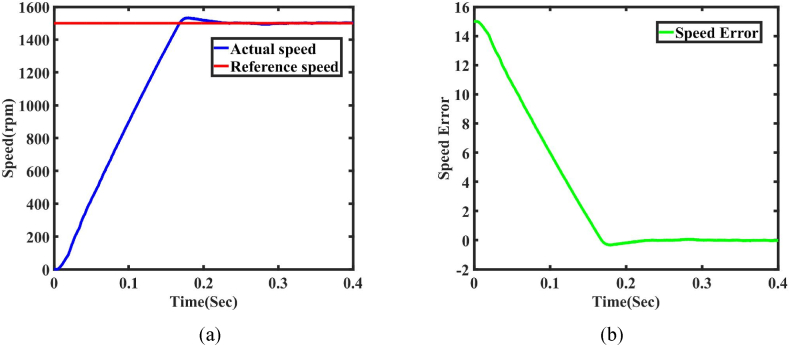
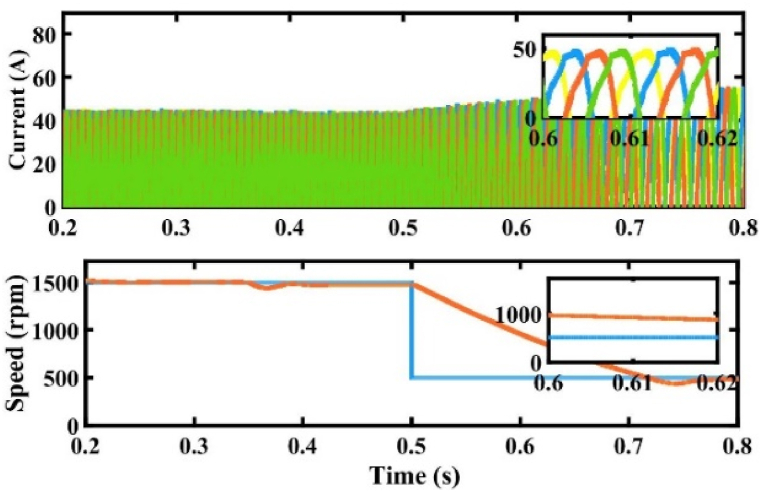
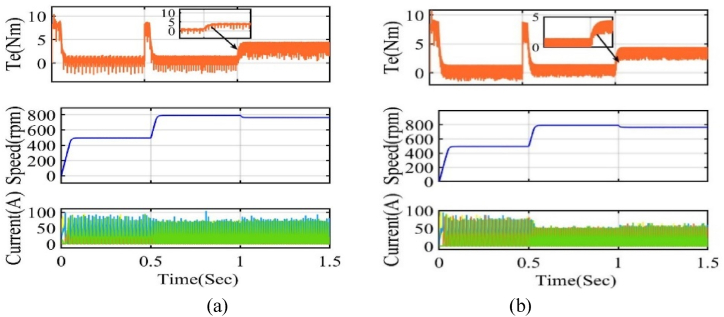
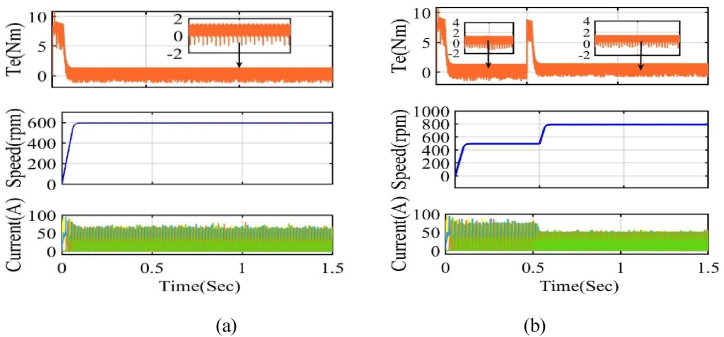
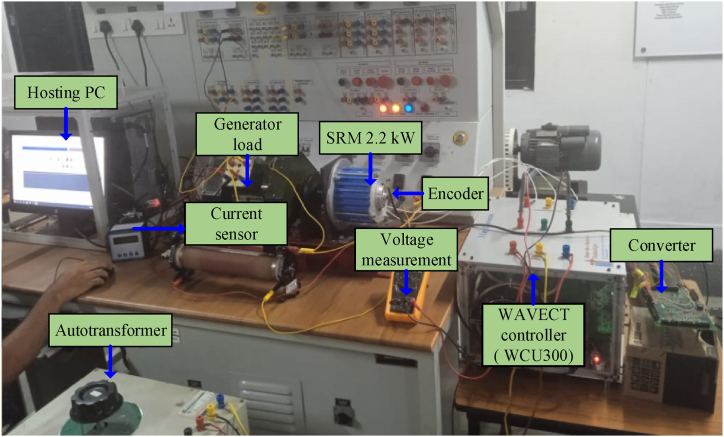
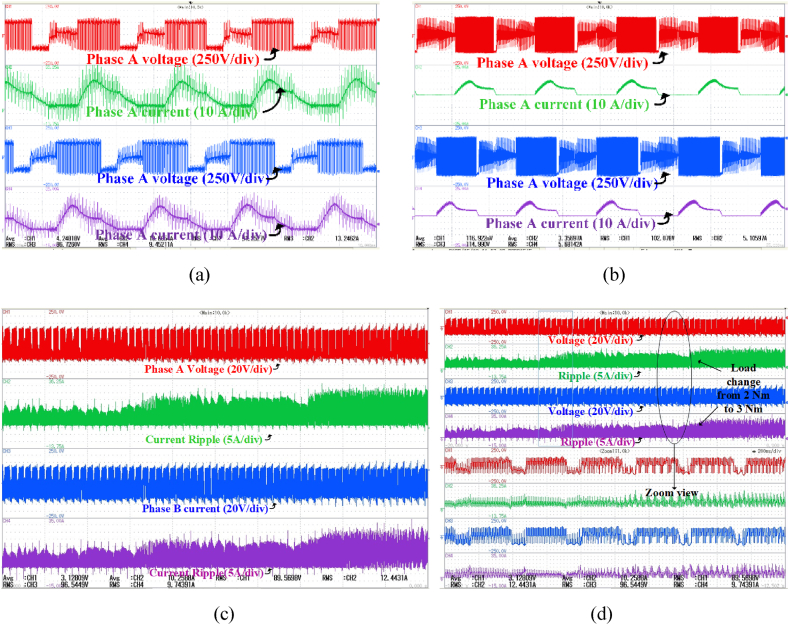
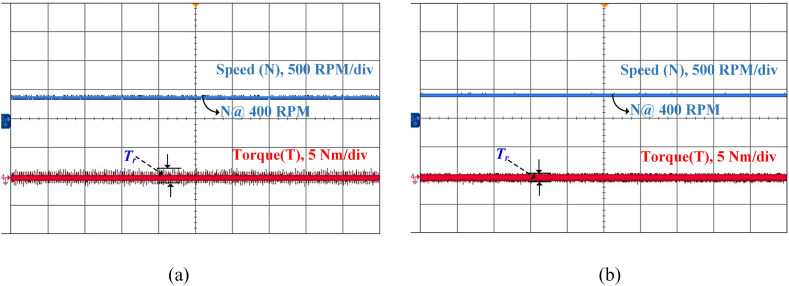
The robust rotor structure and fault-tolerance characteristics of the Switched Reluctance Motors (SRMs) are the best choice for next-generation Electric Vehicle (EV) applications. This machine has few restraints like high torque and flux ripples. However, the existing Model Predictive Control (MPC) using multiple control objectives and maximum sectors in the switching table results in high torque ripples due to the improper sector partition, Voltage Vectors (VVs) and weight factor ( ) selection. This paper proposes a Finite Set-Model Predictive Control (FS-MPC) for an analytical model of a non-linearity SRM machine to analyze the torque ripple performance. The proposed VVs are derived using sector partition based on the rotor position. The control is designed as a single cost function with the weighting factor contributing to smooth torque by selecting optimal control signals. Simulation studies and experiments with a four-phase 8/6 SRM drive verifies the enhanced FS-MPC for real-time implementation. The dynamic speed and ripple values of SRM Drives are measured using a mixed signal oscilloscope and the sensor probes. The laboratory outcomes calculate the analytical equations to validate the findings. The calculated value of torque ripple is 9 % through this FS-MPC. The study reveals that the proposed method is well suited for torque ripple reduction than flux ripples.
开关磁阻电机(SRM)坚固的转子结构和容错特性是下一代电动汽车(EV)应用的最佳选择。这种电机几乎没有诸如高转矩和磁通脉动等限制。然而,现有的使用多个控制目标和开关表中最大扇区数的模型预测控制(MPC),由于扇区划分不当、电压矢量(VV)和权重因子( )选择不当,导致转矩脉动较高。本文针对非线性SRM电机的解析模型提出了一种有限集模型预测控制(FS-MPC),以分析转矩脉动性能。所提出的电压矢量是基于转子位置通过扇区划分推导出来的。通过选择最优控制信号,将控制设计为具有加权因子的单一成本函数,以实现平滑转矩。对四相8/6 SRM驱动器进行的仿真研究和实验验证了增强型FS-MPC可用于实时实现。使用混合信号示波器和传感器探头测量SRM驱动器的动态速度和脉动值。实验室结果计算了解析方程以验证研究结果。通过这种FS-MPC,计算得到的转矩脉动值为9%。研究表明,所提出的方法比磁通脉动更适合于降低转矩脉动。