Liu Chenyu, Zhang Dongliang, Li Wankai
College of Automation Engineering, Shanghai University of Electric Power, Shanghai, 200090, China.
Sci Rep. 2024 Dec 2;14(1):29876. doi: 10.1038/s41598-024-81100-y.
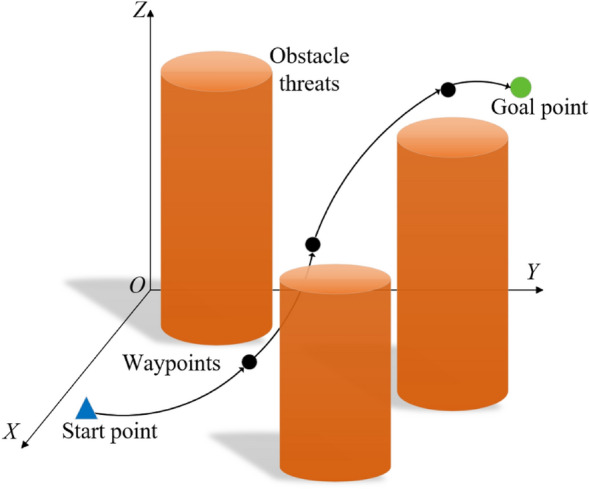
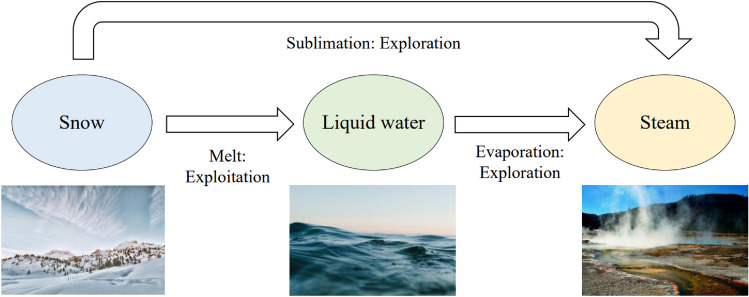
In this paper, an improved Global Dynamic Evolution Snow Ablation Optimizer (GDSAO) is proposed in order to solve the problem of global optimization and Unmanned Aerial Vehicle (UAV) path planning in 3D space with obstacle threats. Three improvement schemes are proposed in GDSAO: (1) Population initialization is carried out using the theory of the best point set to obtain a more diverse initial population; (2) A dynamic snowmelt ratio using the global evolutionary dispersion is proposed to adapt the exploitation process of the original SAO to the evolutionary process of population fitness; (3) A neighborhood dimensional search scheme is proposed to update the locations of all searched individuals outside the elite pool to obtain better population fitness. The algorithm was tested on 30 10-dimensional problems at CEC 2017 and performed better than a series of joint and leading optimization algorithms. The path planning problem of UAV was solved, and the path satisfying all obstacle avoidance threats and corner constraints was obtained. By comparison, GDSAO is superior to the existing algorithms in terms of reliability and stability of optimization.
为解决三维空间中有障碍物威胁情况下的全局优化及无人机路径规划问题,本文提出了一种改进的全局动态进化雪消融优化器(GDSAO)。GDSAO提出了三种改进方案:(1)利用最佳点集理论进行种群初始化,以获得更多样化的初始种群;(2)提出一种利用全局进化离散度的动态融雪率,使原雪消融优化器的探索过程适应种群适应度的进化过程;(3)提出一种邻域维度搜索方案,对精英池外所有搜索个体的位置进行更新,以获得更好的种群适应度。该算法在CEC 2017的30个10维问题上进行了测试,表现优于一系列联合和领先的优化算法。解决了无人机路径规划问题,得到了满足所有避障威胁和拐角约束的路径。相比之下,GDSAO在优化的可靠性和稳定性方面优于现有算法。